Análisis y diseño » History » Version 5
« Previous -
Version 5/6
(diff) -
Next » -
Current version
osvaldo costagliola, 11/12/2024 09:20 AM
- Panorama general
- Organización y planificación
- Análisis y diseño
- Código e implementación
- Evolución del robot
- Resultados
Análisis y diseño¶
Especificación de requerimientos¶
Requerimientos funcionales:
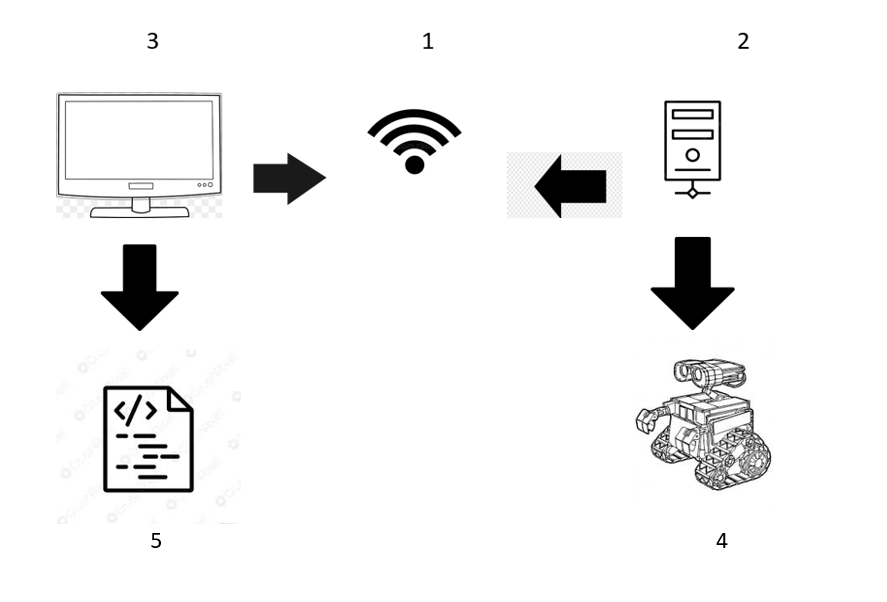
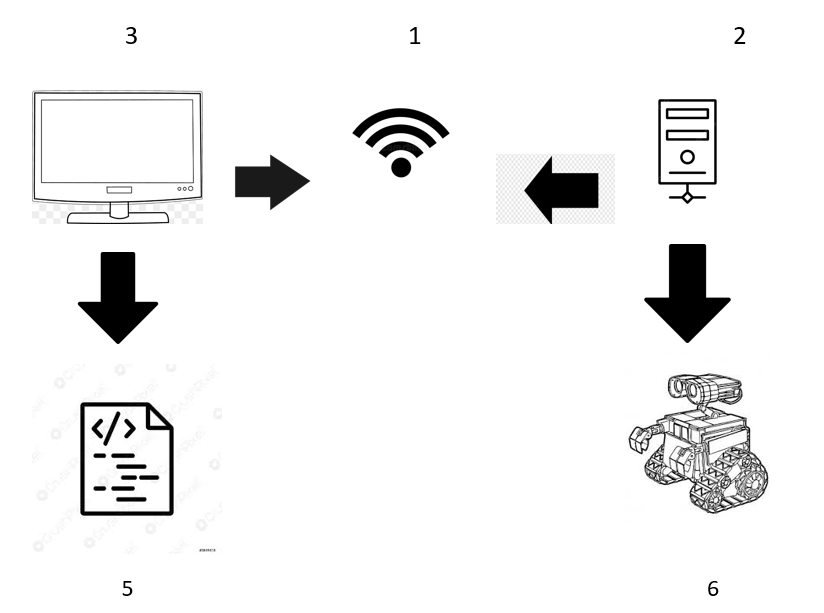
- Desarrollar un robot que se comunique vía wifi y permita al usuario controlarlo mediante una interfaz gráfica en Python.
- Capacidad para moverse en direcciones hacia adelante, atrás, izquierda, derecha, y por ultimo ser capaz de poder bajar y subir la pala.
- La interfaz gráfica debe ofrecer opciones específicas para acciones como desplazarse, ser capaz de transportar la pelota y depositarla en un lugar en especifico.
Requerimientos NO funcionales:
- El proyecto debe incluir un manual detallado con instrucciones completas sobre el funcionamiento integral del robot.
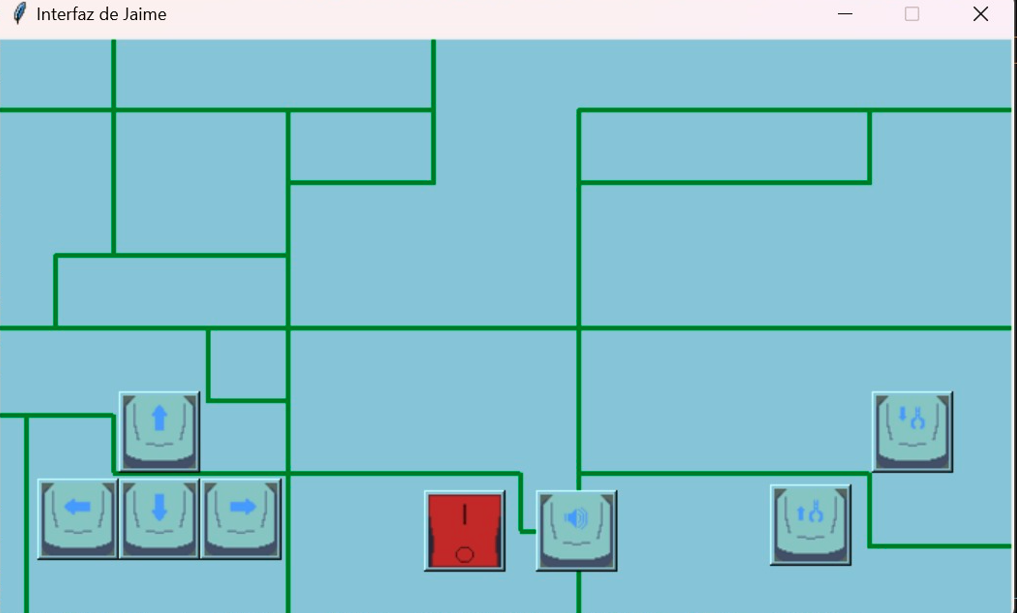
- La interfaz gráfica debe contar con botones específicos para controlar el desplazamiento del robot.
Arquitectura¶
Interfaz¶
Formulas a utilizar¶
Para programar y construir un robot que pueda bajar una pala, recoger una pelota y desplazarse de manera estable, es fundamental aplicar principios físicos que permitan optimizar su funcionamiento. A continuación, les presentaremos las formulas necesarias, para calcular la fuerza, el movimiento, y la estabilidad del robot.
Movimiento de la pala (Torque y Momento de Fuerza):
Es importante calcular al toque para elegir un motor que pueda aplicar la suficiente fuerza para mover la pala hacia abajo, sostener la pelota y levantarla.
Formula:
{kind=link}
{kind=link}