- Panorama general
- Organización y planificación
- Análisis y diseño
- Código e implementación
- Evolución del robot
- Resultados
Análisis y diseño¶
Especificación de requerimientos¶
Requerimientos funcionales:
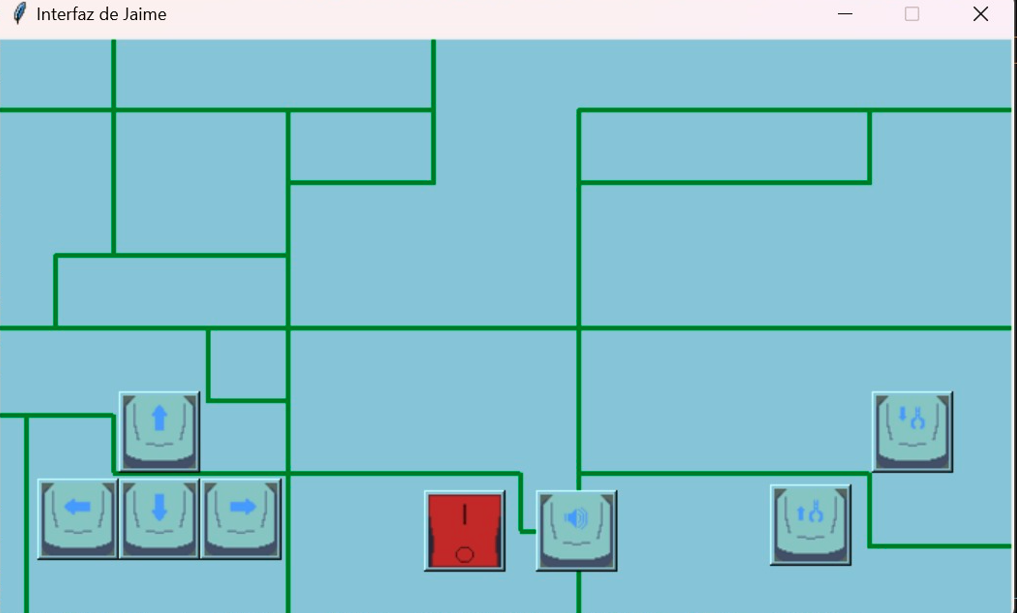
- Desarrollar un robot que se comunique vía wifi y permita al usuario controlarlo mediante una interfaz gráfica en Python.
- Capacidad para moverse en direcciones hacia adelante, atrás, izquierda, derecha, y por ultimo ser capaz de poder bajar y subir la pala.
- La interfaz gráfica debe ofrecer opciones específicas para acciones como desplazarse, ser capaz de transportar la pelota y depositarla en un lugar en especifico.
Requerimientos NO funcionales:
- El proyecto debe incluir un manual detallado con instrucciones completas sobre el funcionamiento integral del robot.
- La interfaz gráfica debe contar con botones específicos para controlar el desplazamiento del robot.
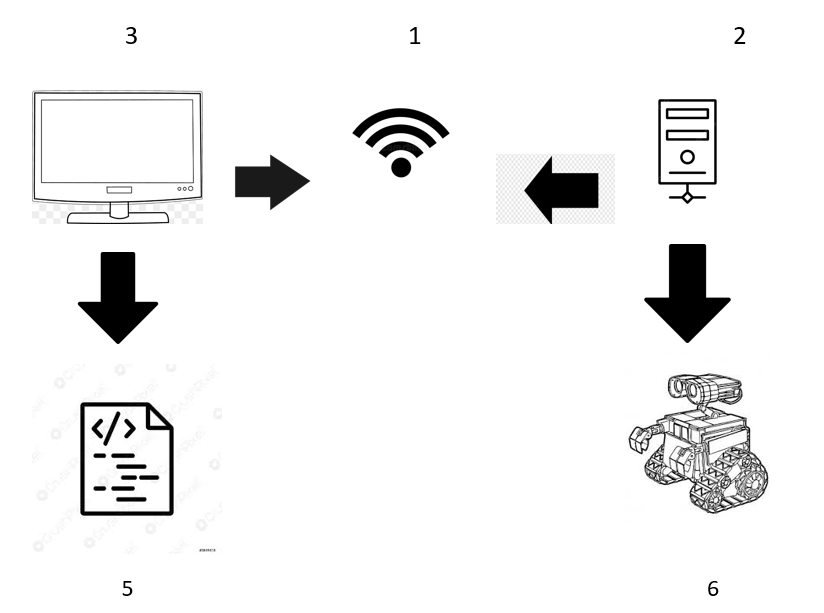
Arquitectura¶
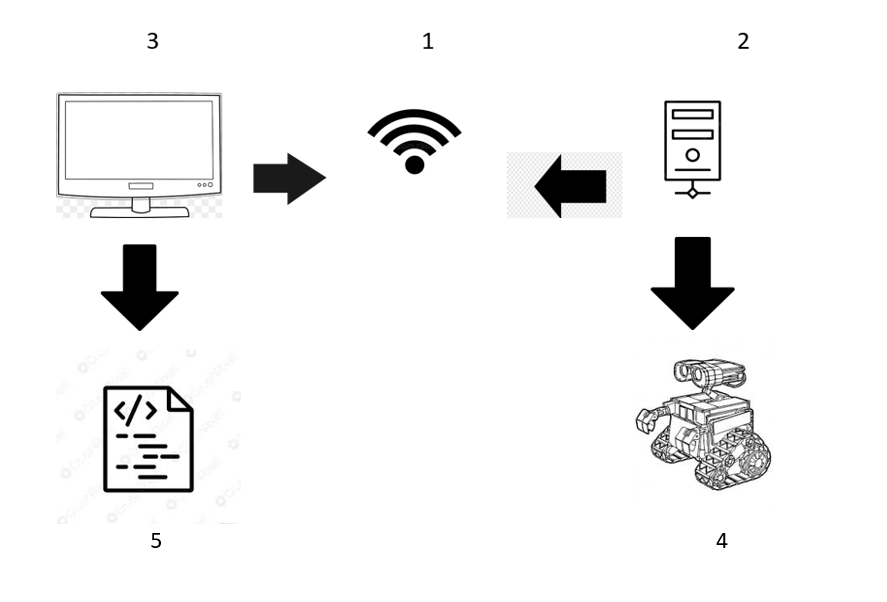
Interfaz¶

Formulas a utilizar¶
Para programar y construir un robot que pueda bajar una pala, recoger una pelota y desplazarse de manera estable, es fundamental aplicar principios físicos que permitan optimizar su funcionamiento. A continuación, les presentaremos las formulas necesarias, para calcular la fuerza, el movimiento, y la estabilidad del robot.
Movimiento de la pala (Torque y Momento de Fuerza):
Es importante calcular el toque para elegir un motor que pueda aplicar la suficiente fuerza para mover la pala hacia abajo, sostener la pelota y levantarla.
Cálculo del Torque Necesario para Levantar la Pelota de Ping Pong
Para calcular el torque necesario que debe ejercer el motor del robot, se considera que la garra tiene una longitud de 80 mm (L = 0,08 m) y que la fuerza gravitacional de la pelota actúa al final de la garra.
________________________________
1. Datos iniciales
• Masa de la pelota: m = 2,7 g = 0,0027 kg
• Aceleración gravitacional: g = 9,81 m/s²
• Longitud de la garra: L = 80 mm = 0,08 m
• Centro de masa de la garra: ubicado en la mitad de la longitud de la garra (L/2 = 0,04 m)
• Masa de la garra: m_garra = 10 g = 0,01 kg
________________________________
2. Fuerza gravitacional de la pelota y la garra
La fuerza gravitacional se calcula con la fórmula:
F = m * g
• Fuerza de la pelota:
F_pelota = 0,0027 kg * 9,81 m/s² = 0,0265 N
• Fuerza de la garra:
F_garra = 0,01 kg * 9,81 m/s² = 0,0981 N
________________________________
3. Cálculo del Torque
El torque se calcula con la fórmula:
T = F * d
Donde:
• F es la fuerza aplicada.
• d es la distancia desde el eje de rotación hasta el punto donde actúa la fuerza.
• Torque debido a la pelota (fuerza aplicada al final de la garra):
T_pelota = F_pelota * L
T_pelota = 0,0265 N * 0,08 m = 0,0021 Nm
• Torque debido a la garra (considerando su centro de masa a la mitad de la longitud):
T_garra = F_garra * (L / 2)
T_garra = 0,0981 N * 0,04 m = 0,0039 Nm
________________________________
4. Torque Total
El torque total requerido es la suma de ambos torques:
T_total = T_pelota + T_garra
T_total = 0,0021 Nm + 0,0039 Nm = 0,0060 Nm
________________________________
5. Ajuste por Eficiencia
Considerando un 20% adicional para compensar posibles pérdidas por fricción e ineficiencia mecánica:
T_ajustado = T_total * 1,2
T_ajustado = 0,0060 Nm * 1,2 = 0,0072 Nm
________________________________
Resultado Final
El torque ajustado que el motor del robot debe proporcionar para levantar la pelota, considerando el peso de la garra y las pérdidas de eficiencia, es aproximadamente:
0,0072 Nm
Este es el valor mínimo de torque requerido para garantizar el funcionamiento adecuado del sistema.
{kind=link}
{kind=link}