Proyecto 1 : The Robot-Cleaner¶
Wiki del proyecto Robot-Cleaner, grupo 2 B
Presentación¶
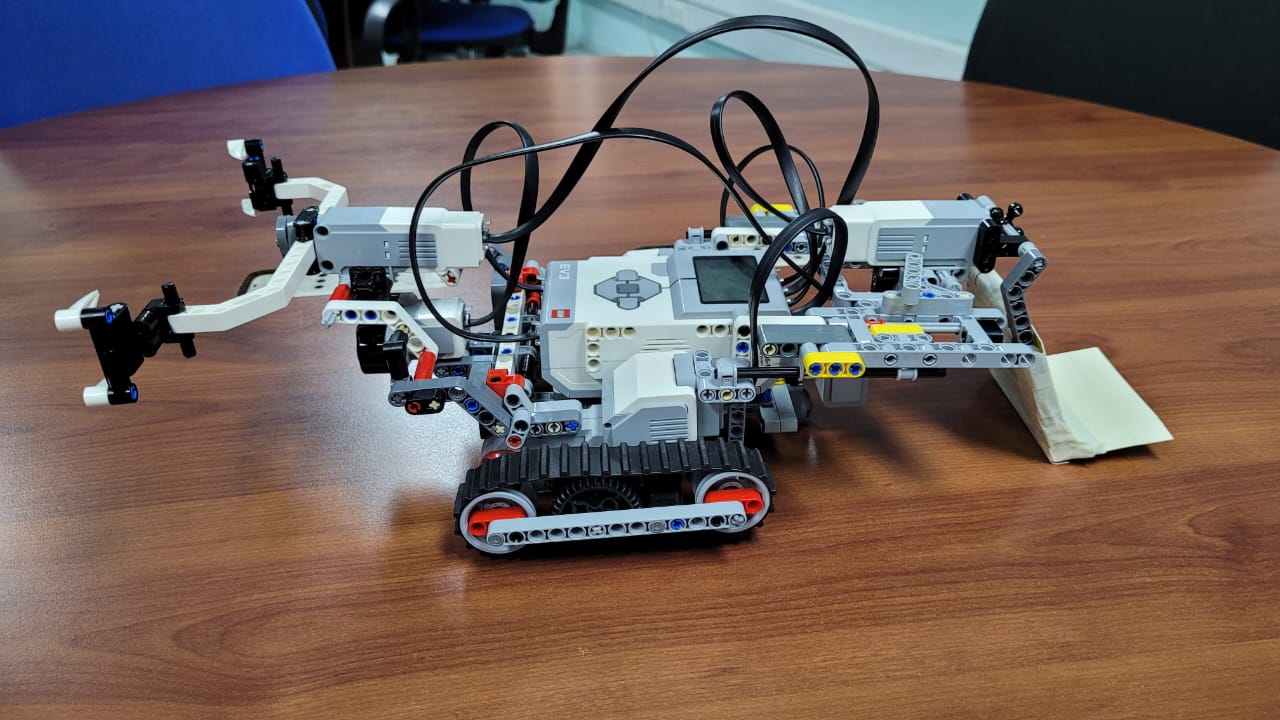
El Robot-Cleaner es un robot cuya función principal es la de limpiar obstáculos, pero también busca ser de fácil uso, modificable y educativo.
Para cumplir su propósito cuenta con 2 herramientas; un arco giratorio que se encarga de sacar de en frente objetos medianos o grandes y una pala trasera que termina de limpiar los residuos que queden por donde va pasando. Estas dos funciones combinadas hacen del Robot-Cleaner un robot confiable para despejar y limpiar caminos de forma rápida y eficiente.
Equipado con 3 motores (2 para moverse y 1 para el arco limpiador), el Robot-Cleaner es capaz de despejar caminos mientras se mueve por terreno difícil o irregular gracias a su movimiento de tractor oruga, que le permite avanzar de forma fácil y estable. Además, está equipado con una pala que le permite limpiar con mayor eficiencia e incluso transportar objetos.
El Robot-Cleaner cuenta con una interfaz que permite controlar el robot de forma remota una vez establecida una conexión wifi entre el robot y un computador.
Funcionamiento¶
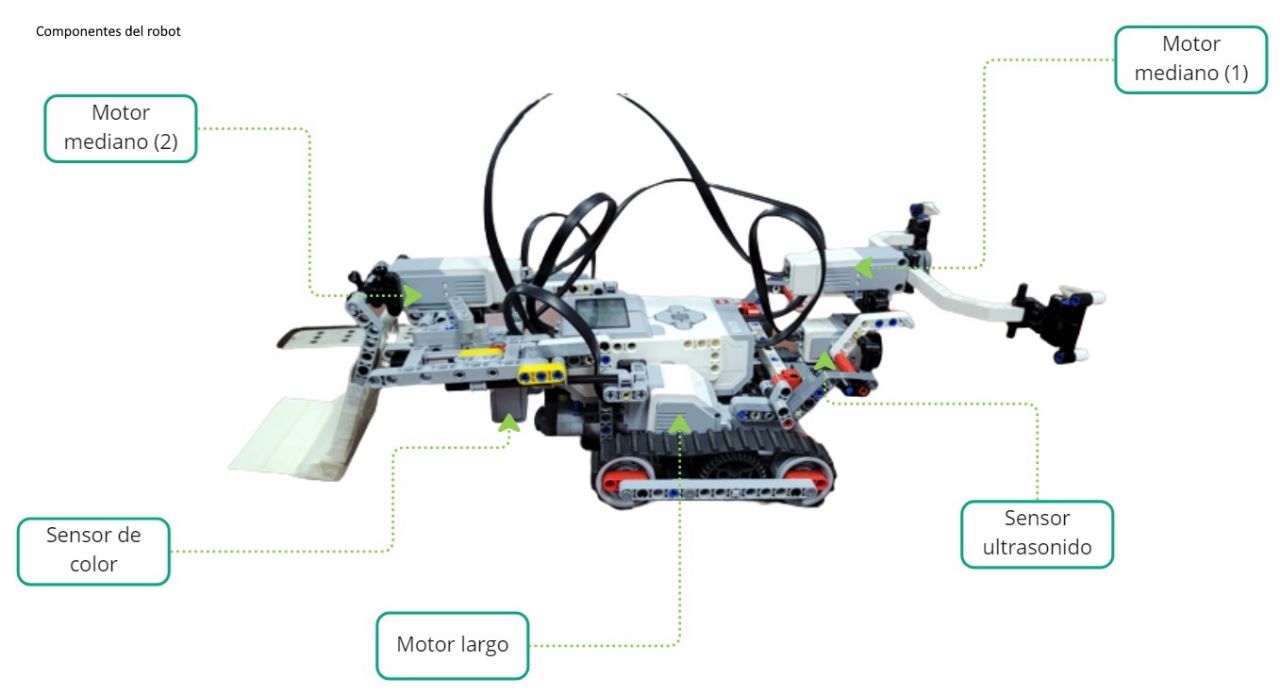
El Robot-Cleaner cumple sus funciones con la ayuda de diversos componentes, los cuales están ligados a funciones específicas.
Motor mediano: Hay 2, uno al frente del robot, encargado de hacer girar el arco limpiador, y el otro se encuentra detrás, y se encarga de subir y bajar la pala. Producen la rotación necesaria para que estos dos mecanismos funcionen.
Sensor de color: Está ubicado detrás del robot. Detecta colores en la dirección a la que esté apuntando, y su función es detener la ejecución del modo automático cuando se detecta el color blanco en el piso.
Motor largo: Hay 2, uno a cada lado del robot en la parte inferior izquierda y derecha respectivamente. Producen la rotación necesaria para que el robot pueda moverse.
Sensor de ultrasonido: Mide la distancia a la que se encuentra un objeto o superficie, y su función es accionar el arco giratorio cuando un objeto está a una determinada distancia. Se ubica al frente del robot, por debajo del arco o aspa.
Ladrillo EV-3: es el cerebro del robot, encargado de recibir y procesar las órdenes desde el PC que esté conectado a él para realizar las tareas que se le asignaron. Se encuentra en el centro. Posee botones para control manual, una pantalla para visualizar ajustes e información, y diversas entradas para conectar los componentes anteriormente descritos.
{kind=link}
{kind=link}