Análisis y diseño » History » Version 13
« Previous -
Version 13/19
(diff) -
Next » -
Current version
Vranika Santiago, 11/30/2022 11:58 PM
Análisis y diseño¶
Evolución del robot¶
>Primera idea: MK-N¶
Era llamativo, sin embargo, su movilidad era deducida, cubría la parte del USB, por lo que no permitía la conexión y lo más importante, es que no cumplía con la función de lanzar proyectiles.
>Segunda idea: MK-l¶
Una desventaja fue que la base de movimiento era inestable y además, el espacio era reducido para construir el cañón.
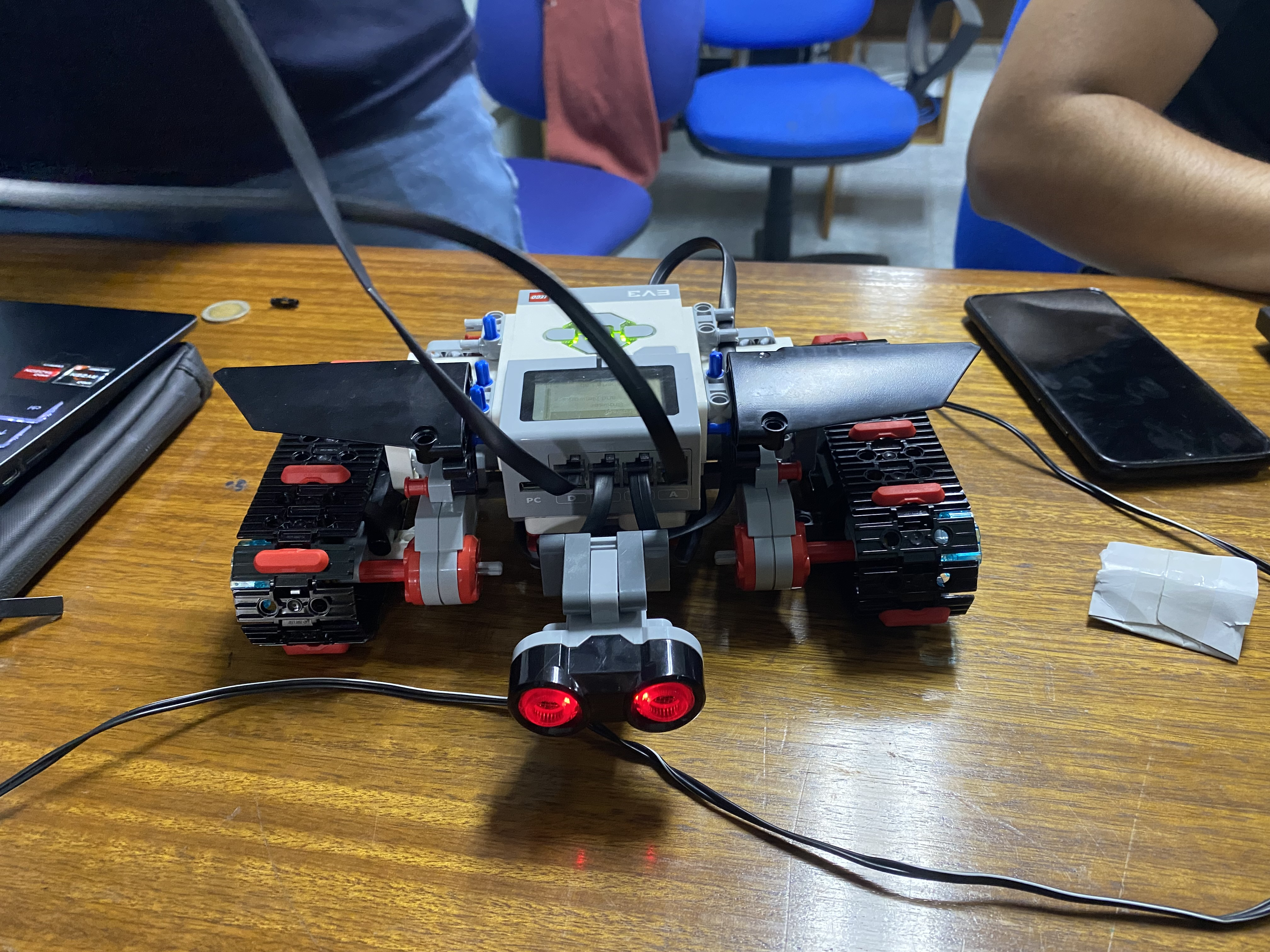
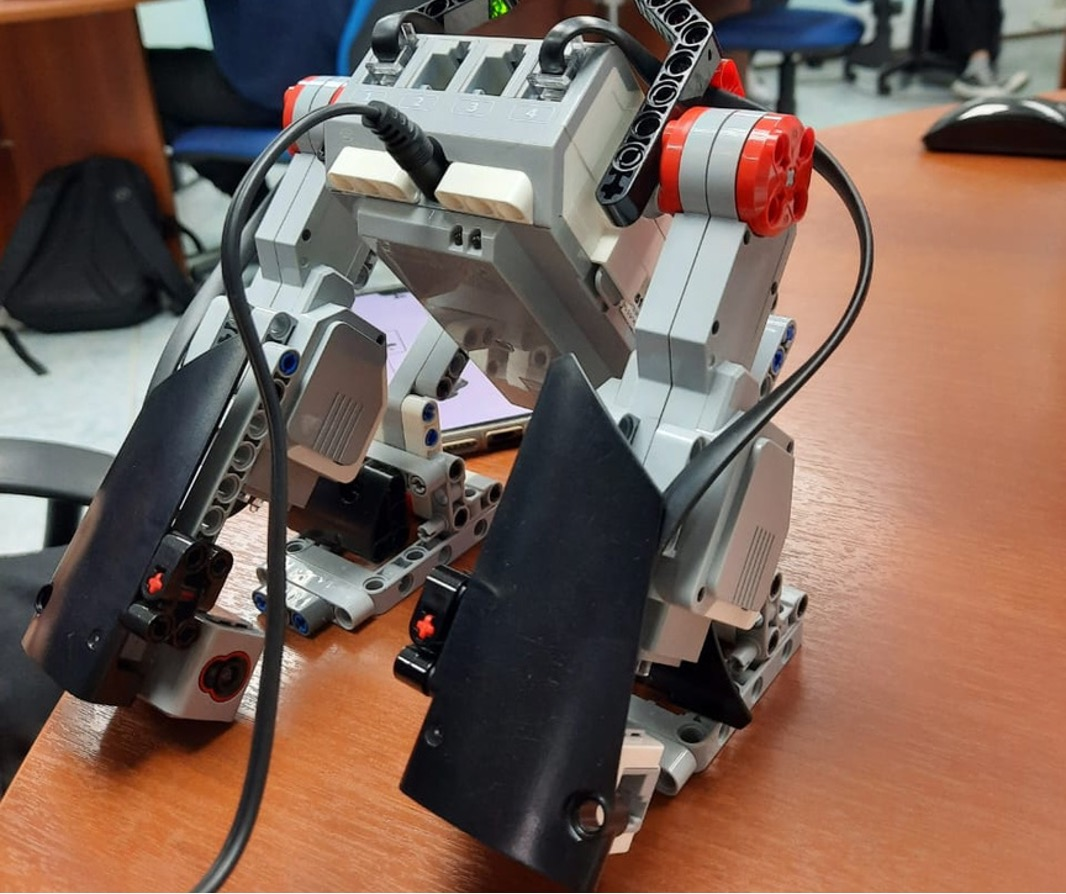
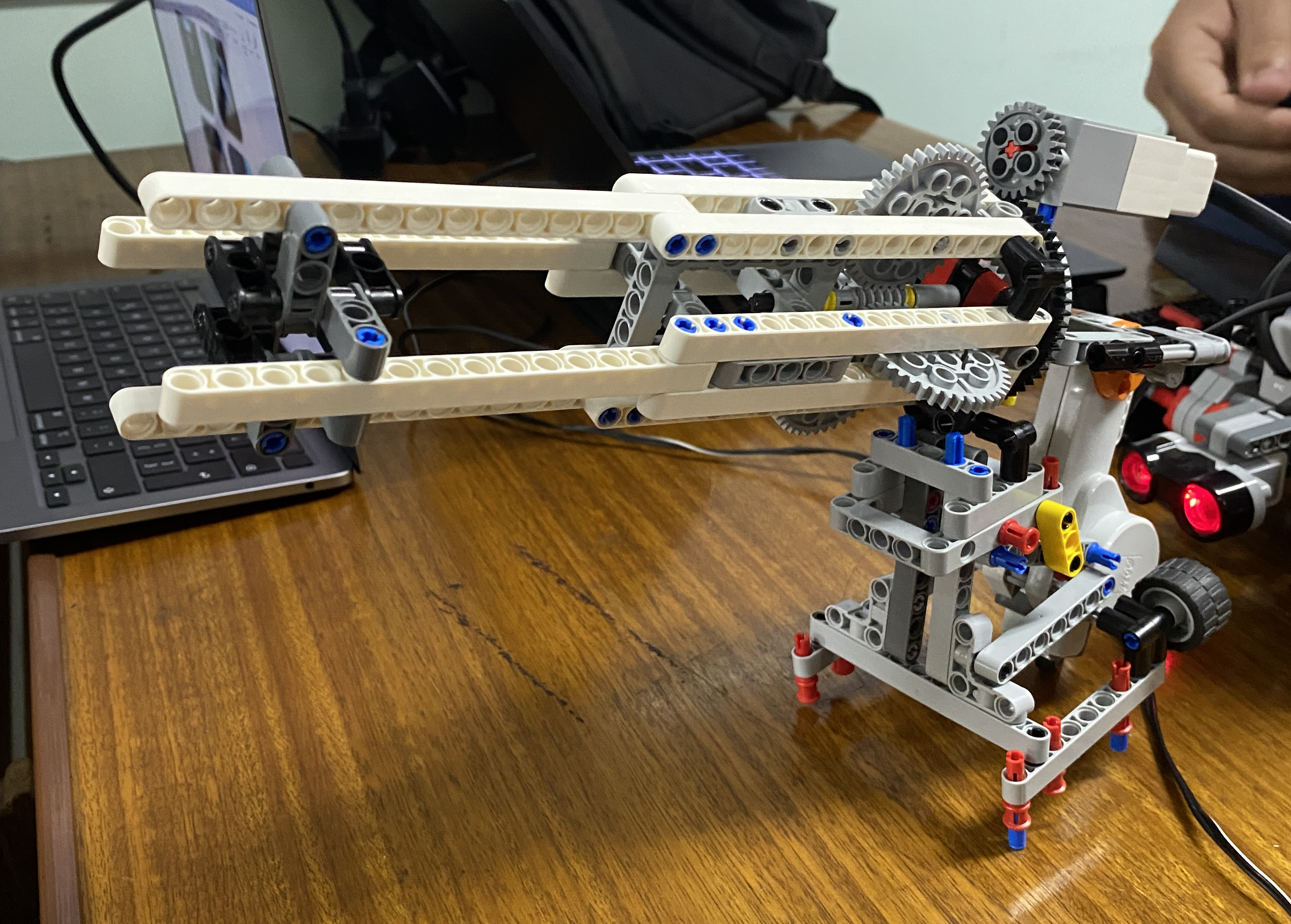
h3 >Tercera idea: MK-ll
Cumple con todo lo necesario; el cañón para lanzar proyectiles es estable, movilidad óptima, tiene alta capacidad de munición y es atractivo visualmente.
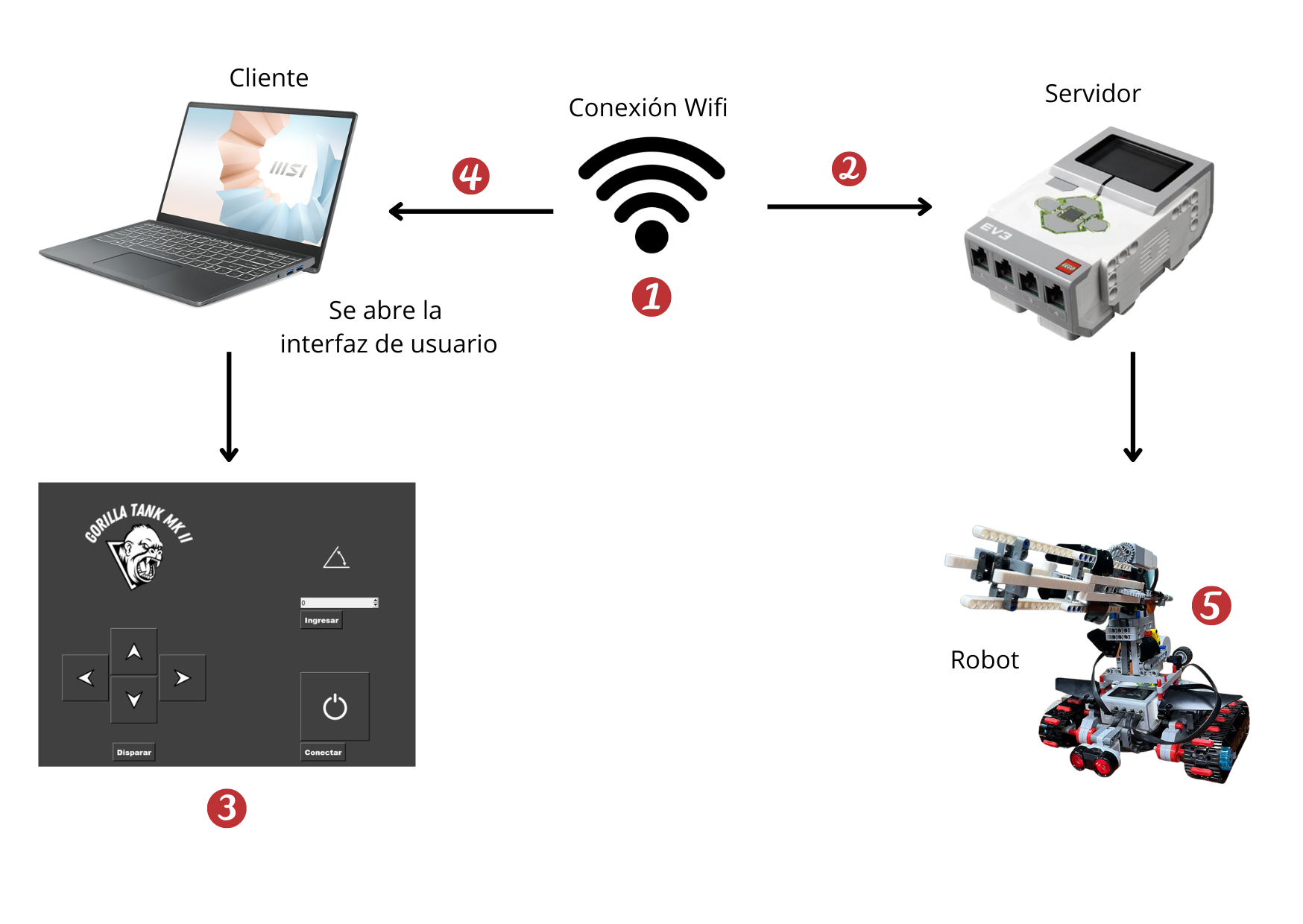
Arquitectura¶
1. El robot y el notebook deben estar conectados a la misma red Wifi.
2. Iniciar el archivo Server.py para así obtener la conexión remota con el notebook.
3. El usuario debe iniciar la interfaz gráfica para controlar el robot a distancia.
4. La interfaz se conectará al servidor del robot y el usuario podrá controlarlo.
5. Robot que realizará los movimientos enviados por el usuario gracias al servidor establecido entre sí mismo y el notebook del usuario.
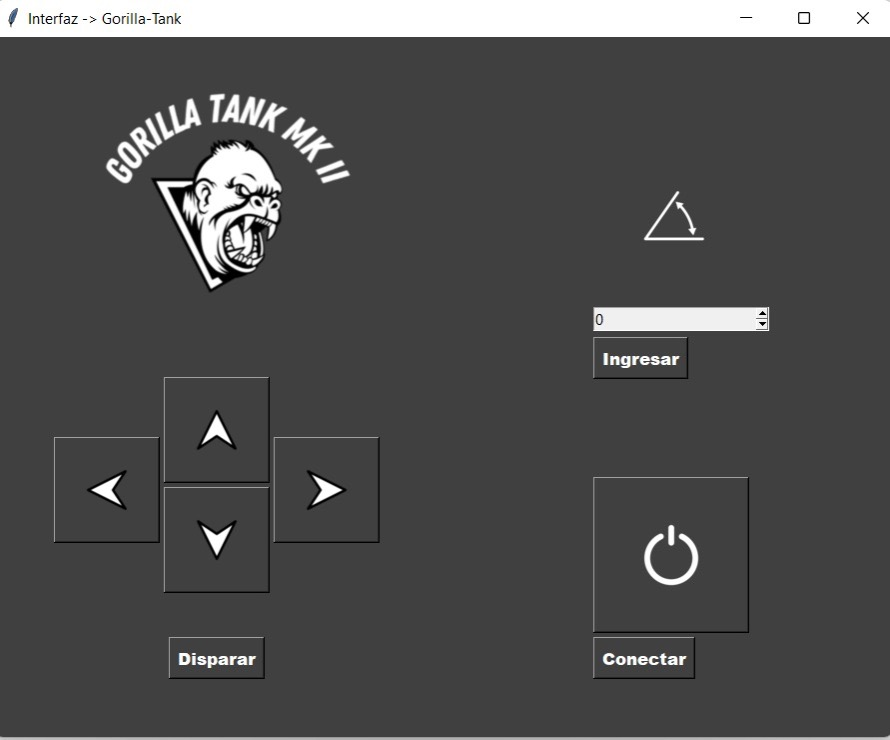
Interfaz¶
- Flechas para indicar las direcciones en las que el robot se desplazará, es decir, ir para adelante, para atrás, girar a la izquierda y girar a la derecha.
- Botón “Ingresar” que tiene como función ingresar el ángulo del cañón, en el cual en la parte de arriba se puede encontrar el símbolo de un ángulo.
- Botón “Disparar” que logra disparar el proyectil.
- Botón “Conectar” el cual vincula al cliente a través de la IP del servidor que está en el EV3.
- Logo característico del robot construido junto a su nombre.
- Botón con el símbolo de on – off que permite salir del programa, en cualquier momento.
Ficheros
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}