Análisis y diseño » History » Version 25
« Previous -
Version 25/28
(diff) -
Next » -
Current version
cristobal hernandez, 12/13/2024 01:26 AM
| ⌂ | Introducción | Organización y planificación | Progreso del robot | Análisis y diseño | Código e implementación |
Análisis y diseño¶
Requerimientos funcionales¶
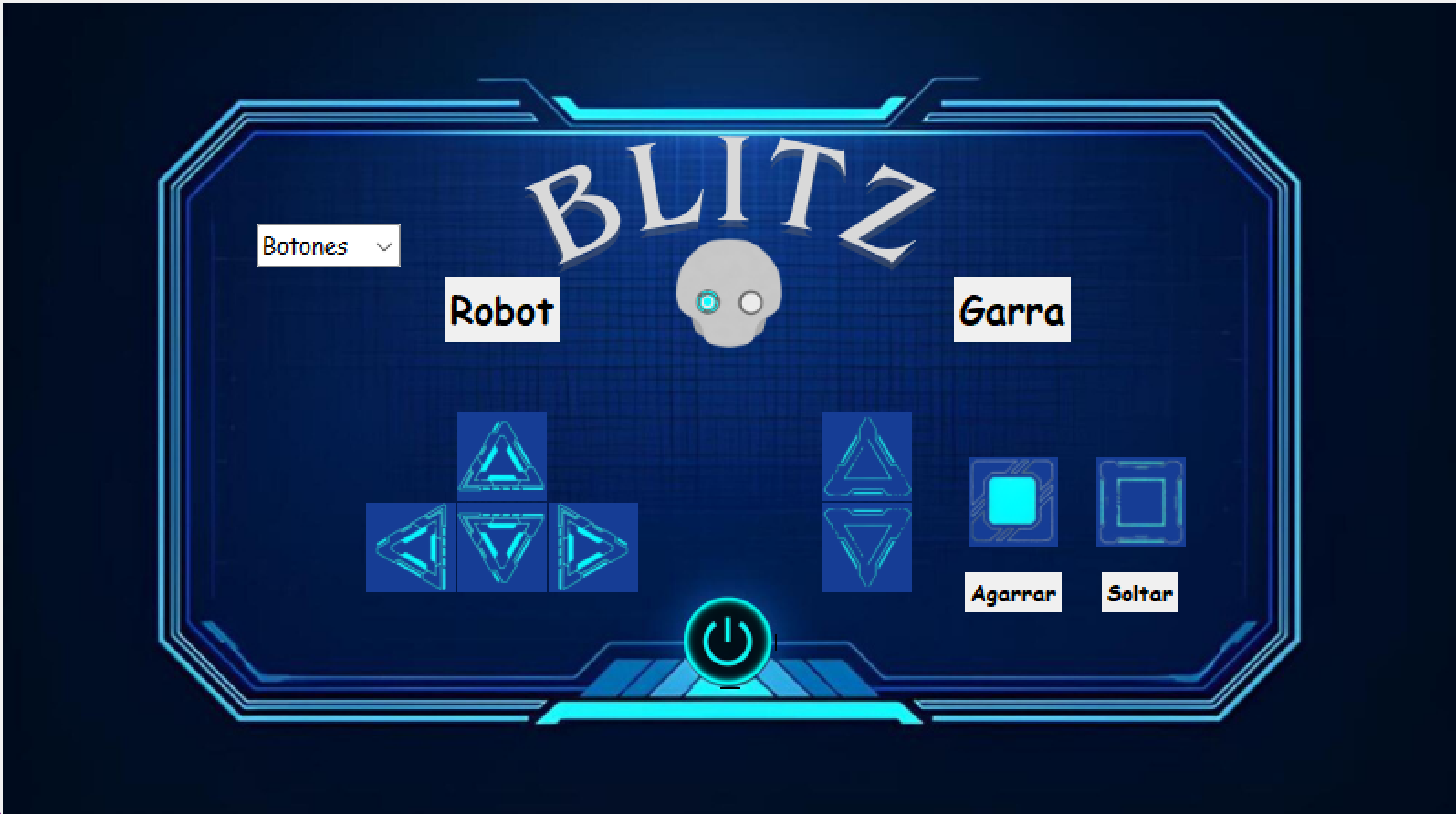
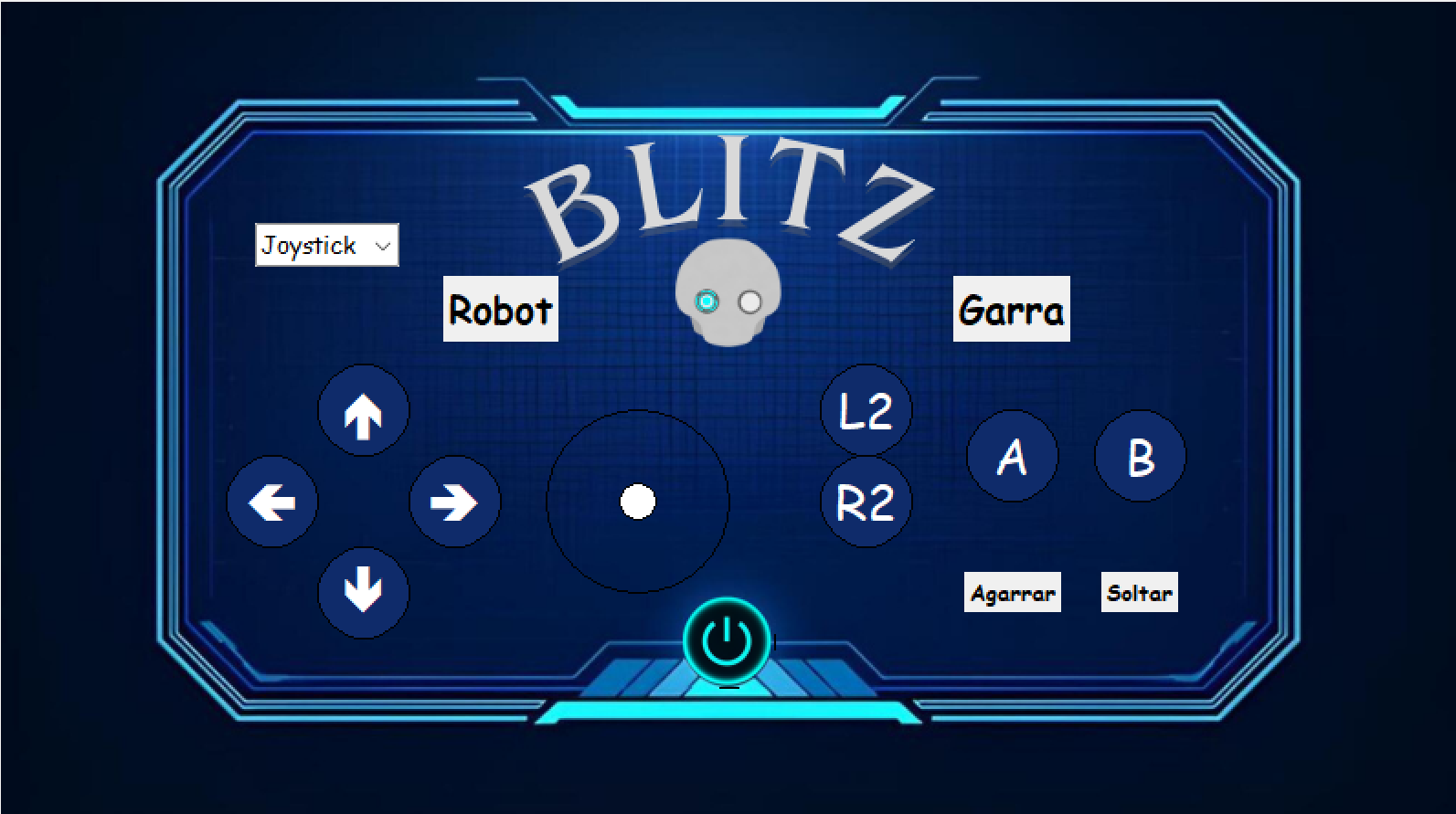
- El robot debe poder moverse en todas las direcciones
- El robot debe ser capaz de recoger una pelota de ping pong y dejarla
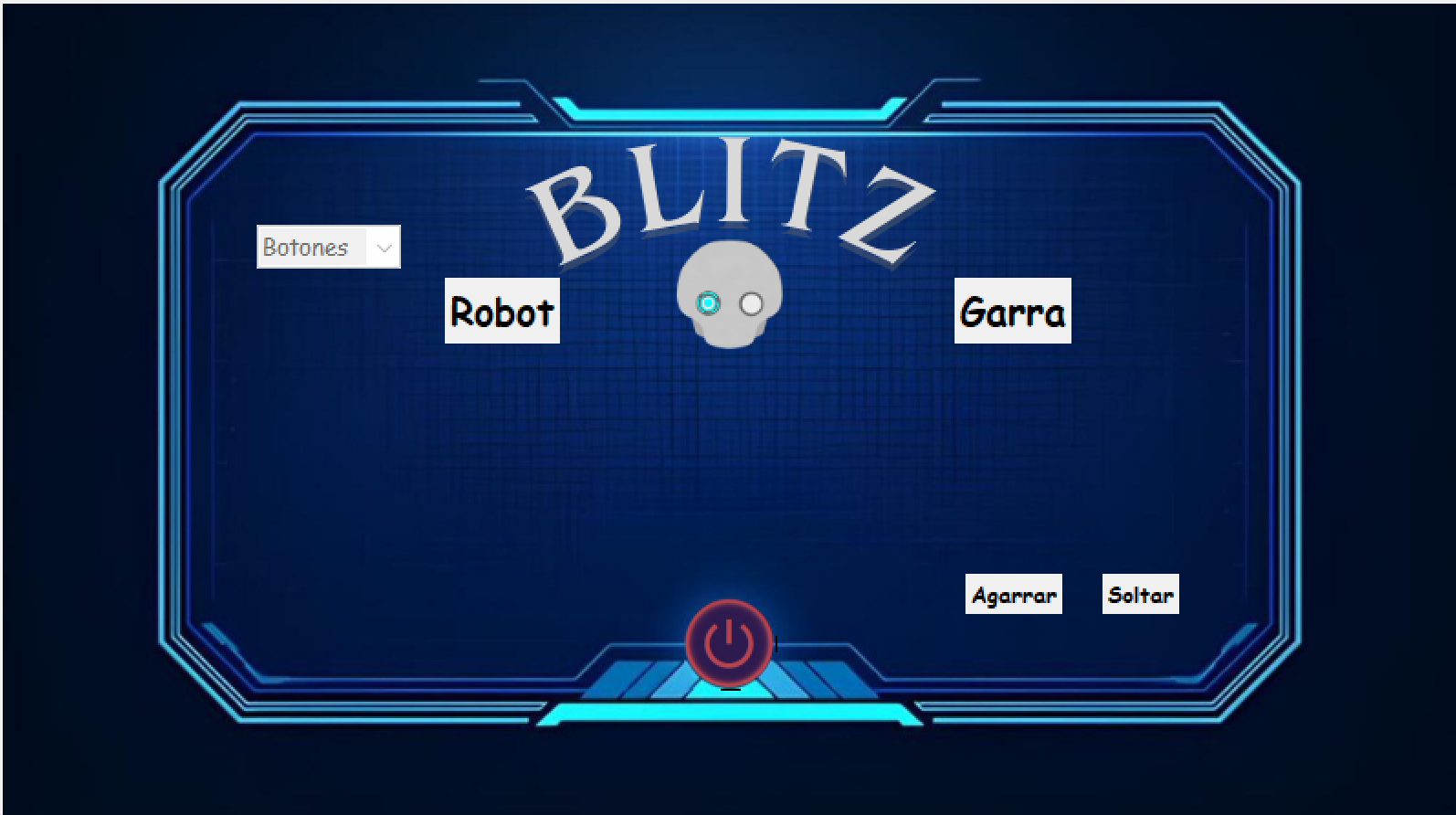
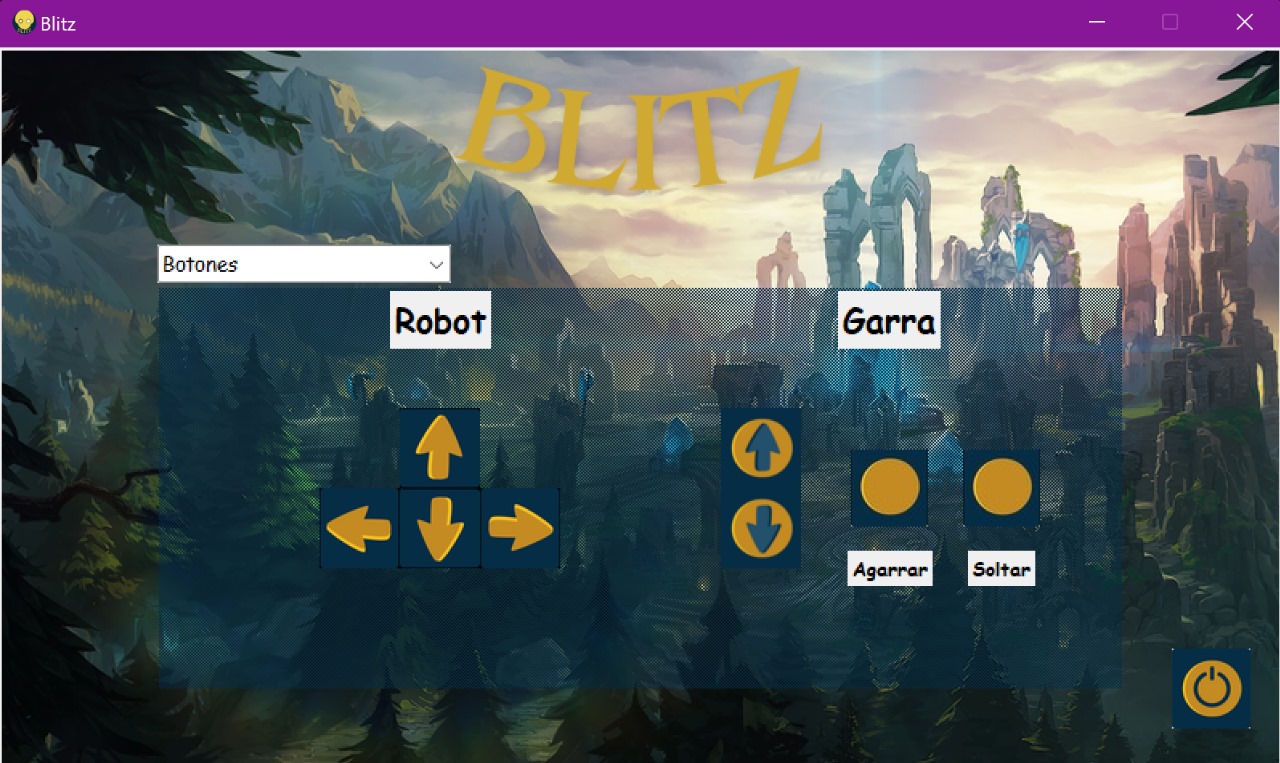
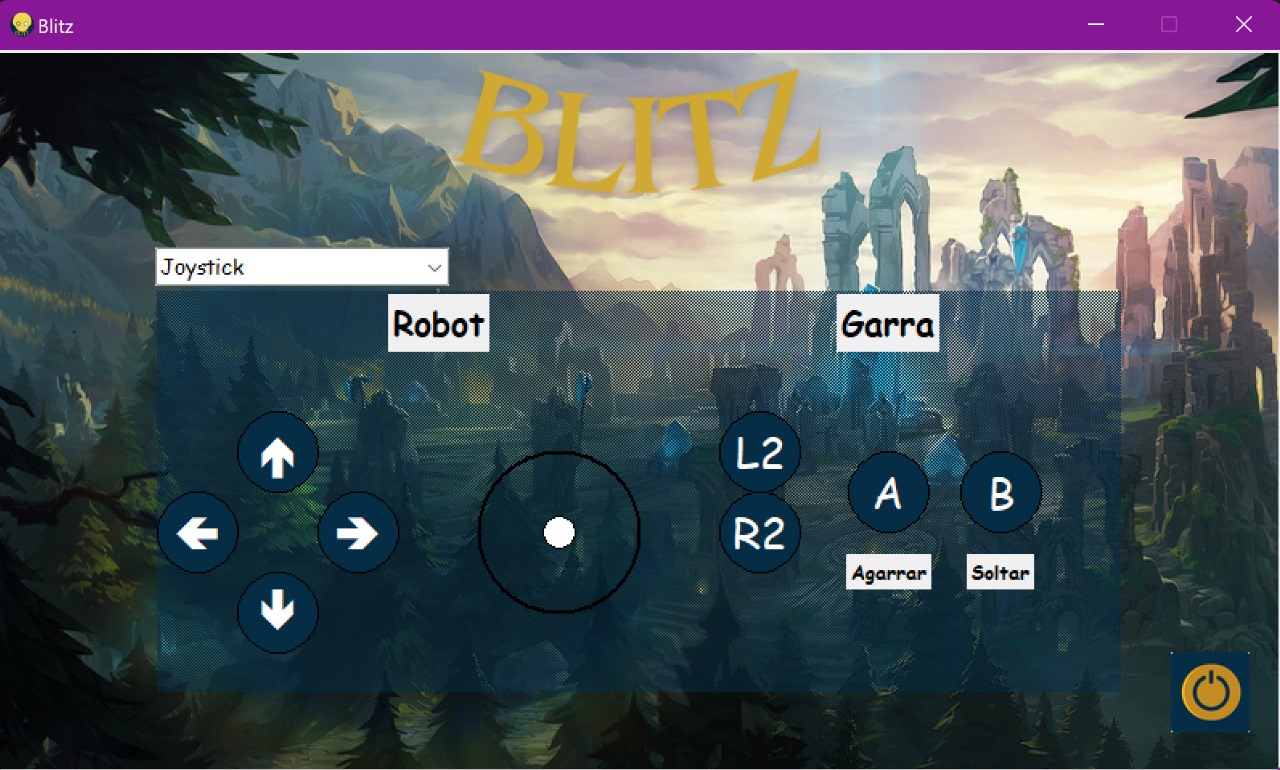
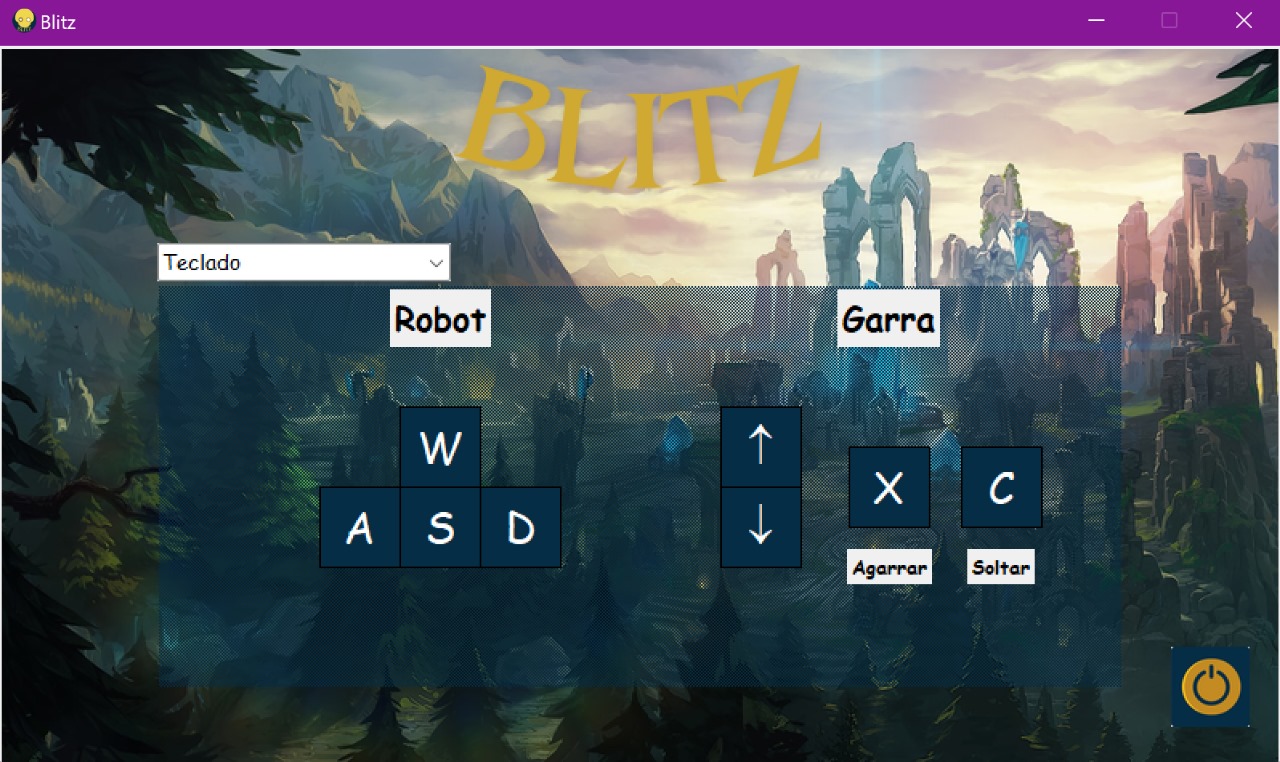
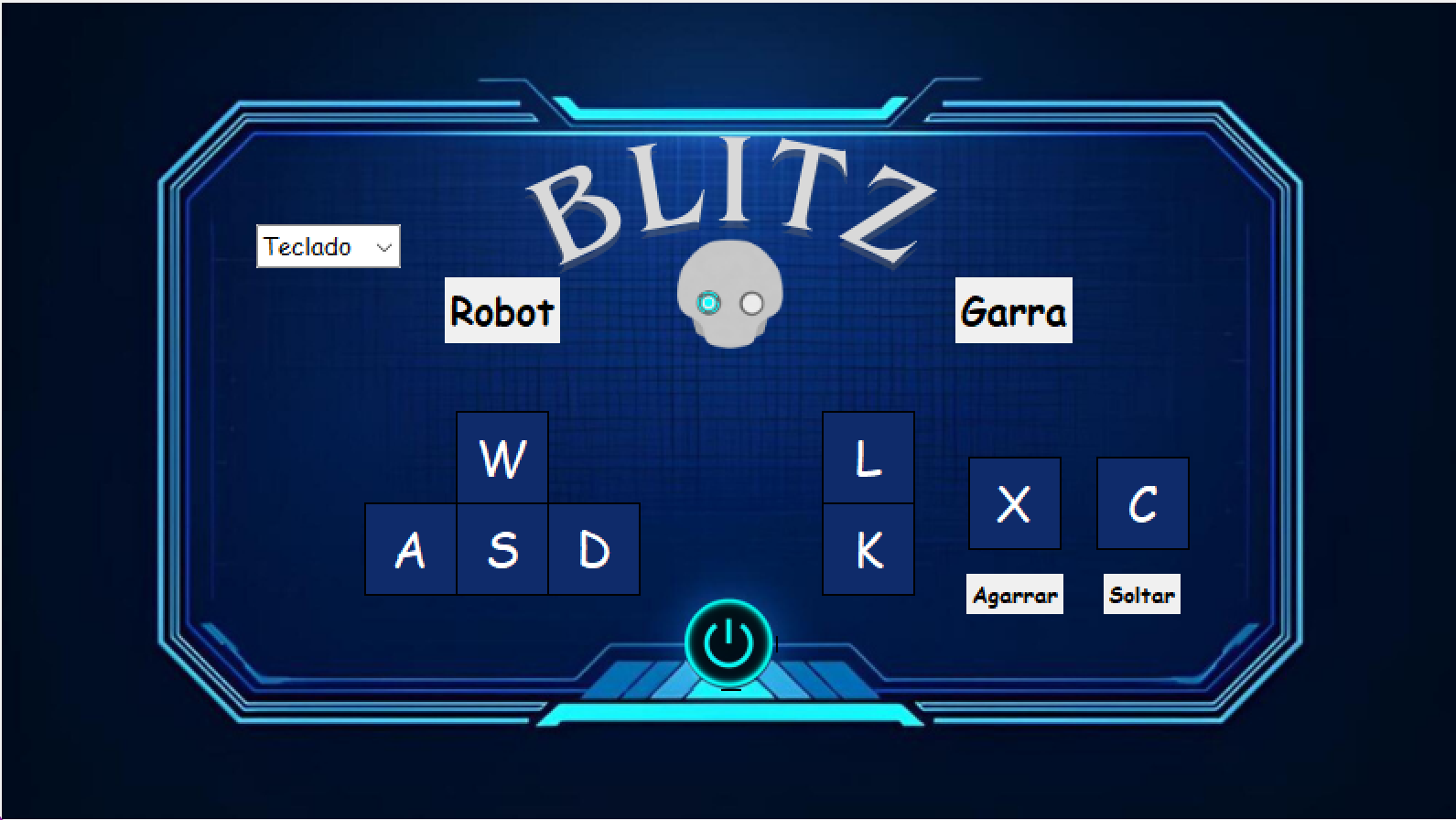
- El robot debe poder ser controlado por el usuario a través de una interfaz
Requerimientos no funcionales¶
- La interfaz gráfica debe ser fácil de usar y responder en menos de 2 segundos
- El manual de usuario debe ser detallado y claro
- El robot debe funcionar por al menos 3 horas sin necesidad de recargar
Arquitectura¶
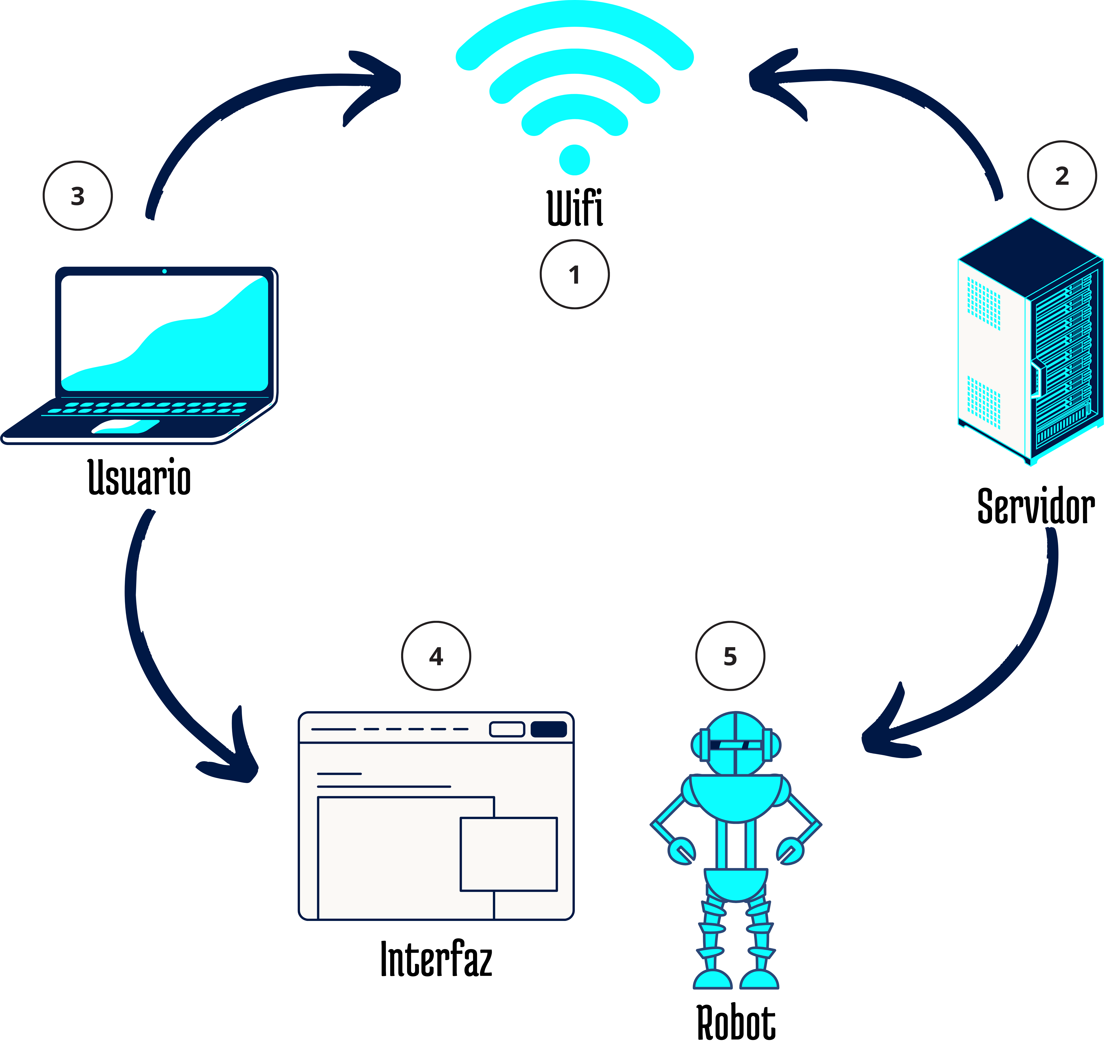
- El notebook y el EV3 deben estar conectados a la misma red de WiFi.
- Este conecta el cliente con el robot.
- El notebook hará que la interfaz pueda conectarse con el servidor del robot para el control de este.
- Utilizada para el control del robot.
- Ejecutará acciones según las instrucciones del usuario.
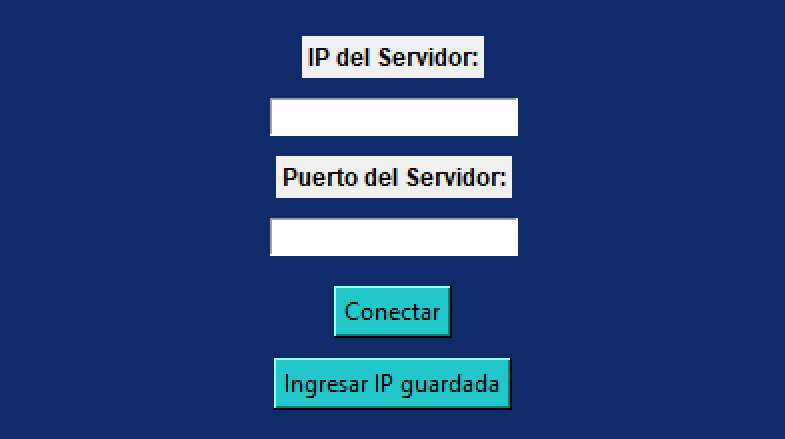
Interfaz¶

http://pomerape.uta.cl/redmine/attachments/download/5364/interfaz-conexion.png!
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}