Índice:
- Panorama General
- Organización y Planificación
- Análisis y Diseño
- Código e Implementación
- Resultados
- Evolución del robot
Análisis y Diseño¶
Requerimientos Funcionales¶
- El robot debe tener la capacidad de moverse.
- El robot debe tener la capacidad de golpear una pelota de golf en una trayectoria específica.
- El robot debe ser controlado remotamente mediante una interfaz de usuario.
Requerimientos no Funcionales¶
- Interfaz gráfica que contenga los controles necesarios para poner al robot en movimiento, conectarse al dispositivo controlador y golpear la pelota.
- El programa debe ser desarrollado con el lenguaje de programación Python en conjunto con la biblioteca ev3dev.
- El robot debe ser ensamblado utilizando piezas del kit Lego Mindstorms.
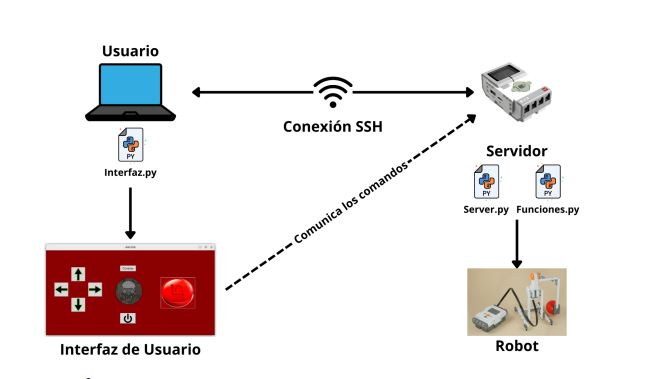
Arquitectura¶
El proceso de conexión y control remoto del kit Lego Mindstorms EV3 se realiza desde un sistema operativo Linux, la comunicación se establece a través de una conexión SSH. Tras configurar la red, la conexión se inicia mediante la terminal Linux con el comando ssh robot@ev3dev.local. Una vez autenticado, se accede a la terminal del EV3, permitiendo la ejecución de comandos y programas en Python. Luego de conseguir e implementar la dirección ip del robot se ejecuta en éste el servidor que recibe la información del usuario. Además, se implementa una interfaz gráfica en un archivo Python en el PC Linux, desde donde se envían instrucciones remotas al robot a través de la conexión SSH.
En el siguiente diagrama se ejemplifica el proceso de conexión:
Interfaz Grafica¶
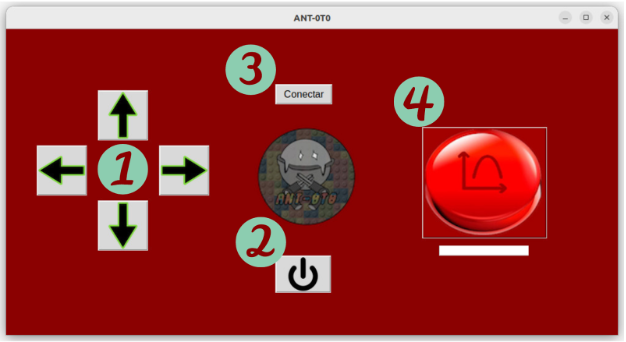
1. Botones de movimiento, cada flecha es un botón que pone en movimiento al robot en la dirección correspondiente.
2. Botón de apagado, al ser presionado cierra el programa.
3. Botón de conectar, intenta establecer una conexión entre el servidor, el robot y el usuario.
4. Botón de lanzar, al presionarlo utiliza la distancia proporcionada en la caja de texto inferior, de lo contrario, lanza la pelota a una distancia aproximada de un metro.
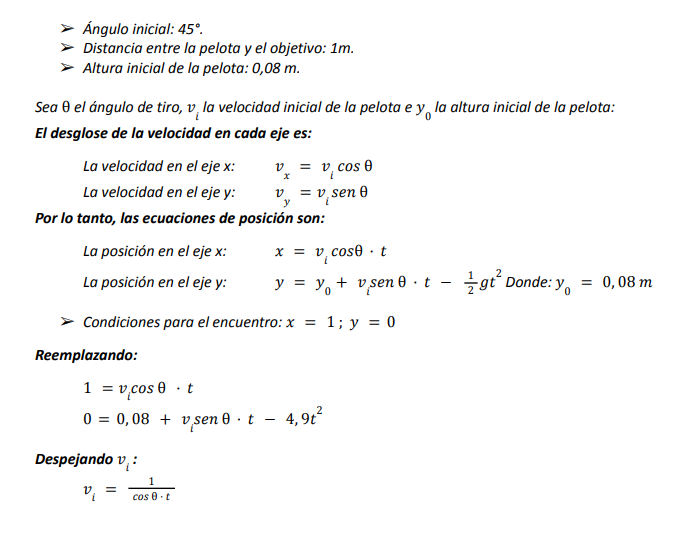
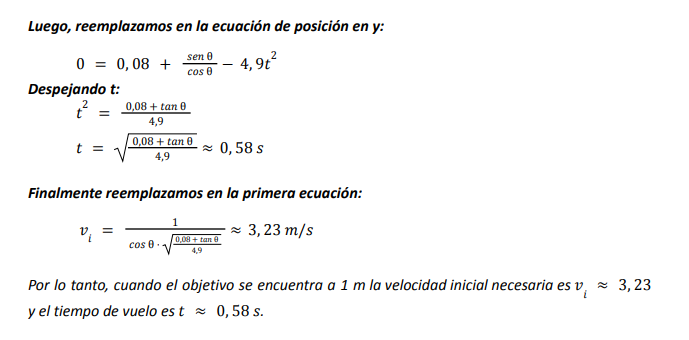
Fundamentos de Proyectiles¶
El tipo de movimiento que sigue la pelota de golf al ser lanzada es un movimiento parabólico ideal, trayectoria que se ha estudiado previamente en la asignatura de Mecánica Clásica. Este tipo de movimiento se estudia exclusivamente en dos dimensiones, caracterizándose por la ausencia de fuerzas oponentes al movimiento a lo largo del eje x, lo que mantiene la velocidad constante en esa dirección. En contraste, en el eje y, la variación del movimiento experimenta cambios uniformes, siendo influenciada por la constante aceleración de la gravedad en cada instante.
La configuración inicial implica un ángulo de inclinación específico, en este caso se asume un ángulo de aproximadamente 45°. Además, se toma como dato conocido la distancia entre el objetivo y la posición de la pelota, junto con la altura inicial de la pelota.
Ejemplo de la trayectoria: