Desarrollo del producto » History » Version 9
« Previous -
Version 9/18
(diff) -
Next » -
Current version
mayling alvarez, 10/04/2024 10:19 PM
| ⌂ | Introducción | Panorama general | Logística | Desarrollo del producto | Manual de usuario | Resultados |
Desarrollo del producto¶
Arquitectura¶
Modelos¶
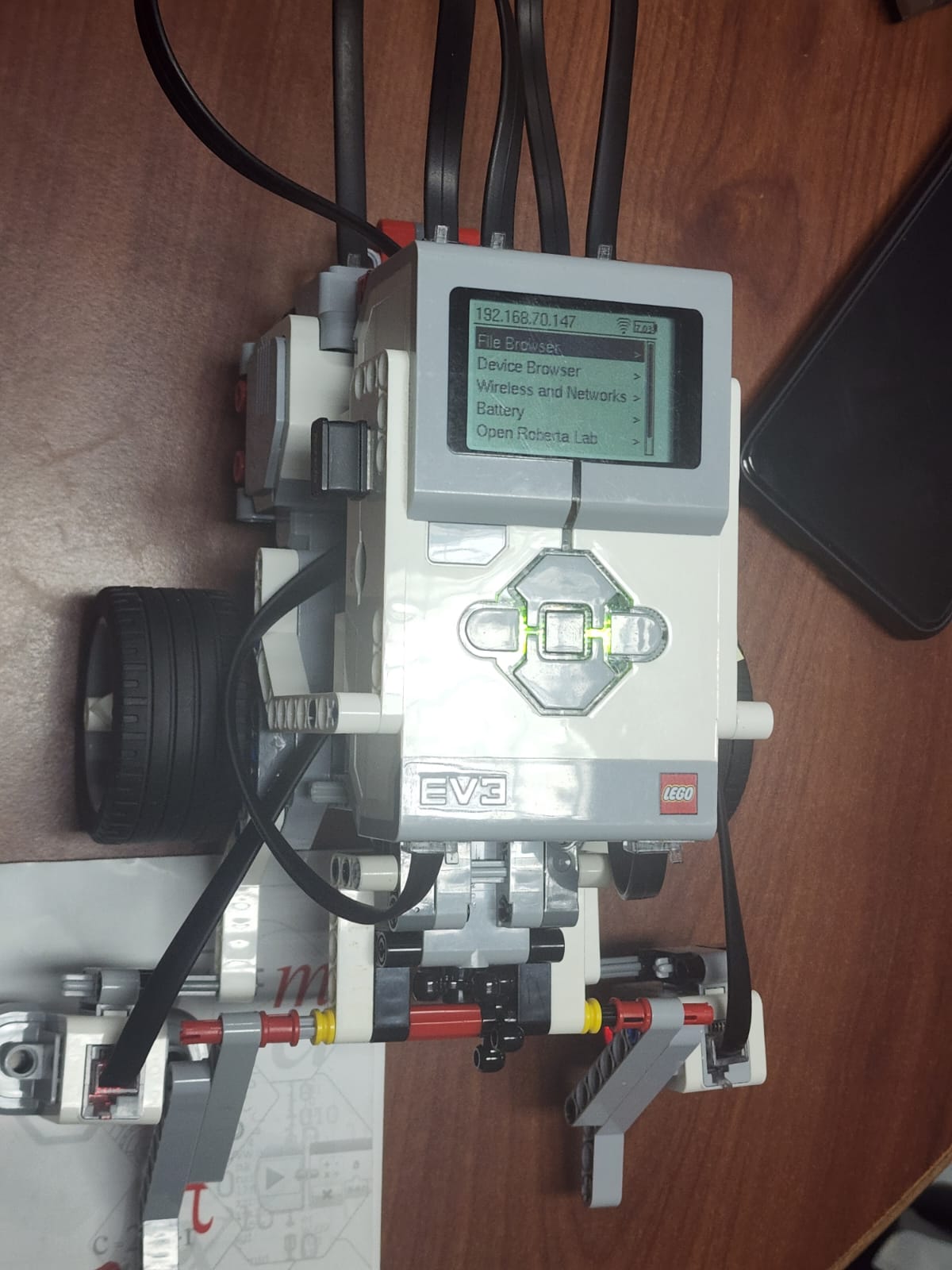
1. Prototipo Inicial
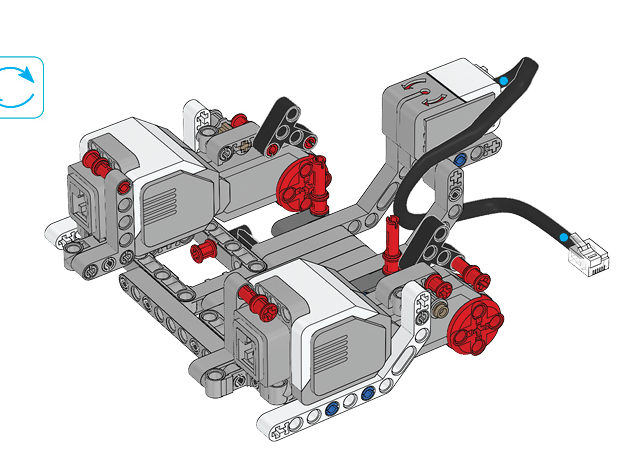
El primer modelo, denominado prototipo, fue construido siguiendo las instrucciones del manual incluido con el set de piezas. Este modelo inicial sirvió como base para familiarizarnos con el proceso de programación y las herramientas de software necesarias para el proyecto. Durante esta fase, los codificadores comenzaron a experimentar con las librerías, el entorno de desarrollo, y la interacción entre el hardware y el software. Aunque el objetivo principal de este modelo no era su diseño físico, permitió a todo el equipo ganar experiencia en la implementación de programación básica y probar las funcionalidades iniciales.
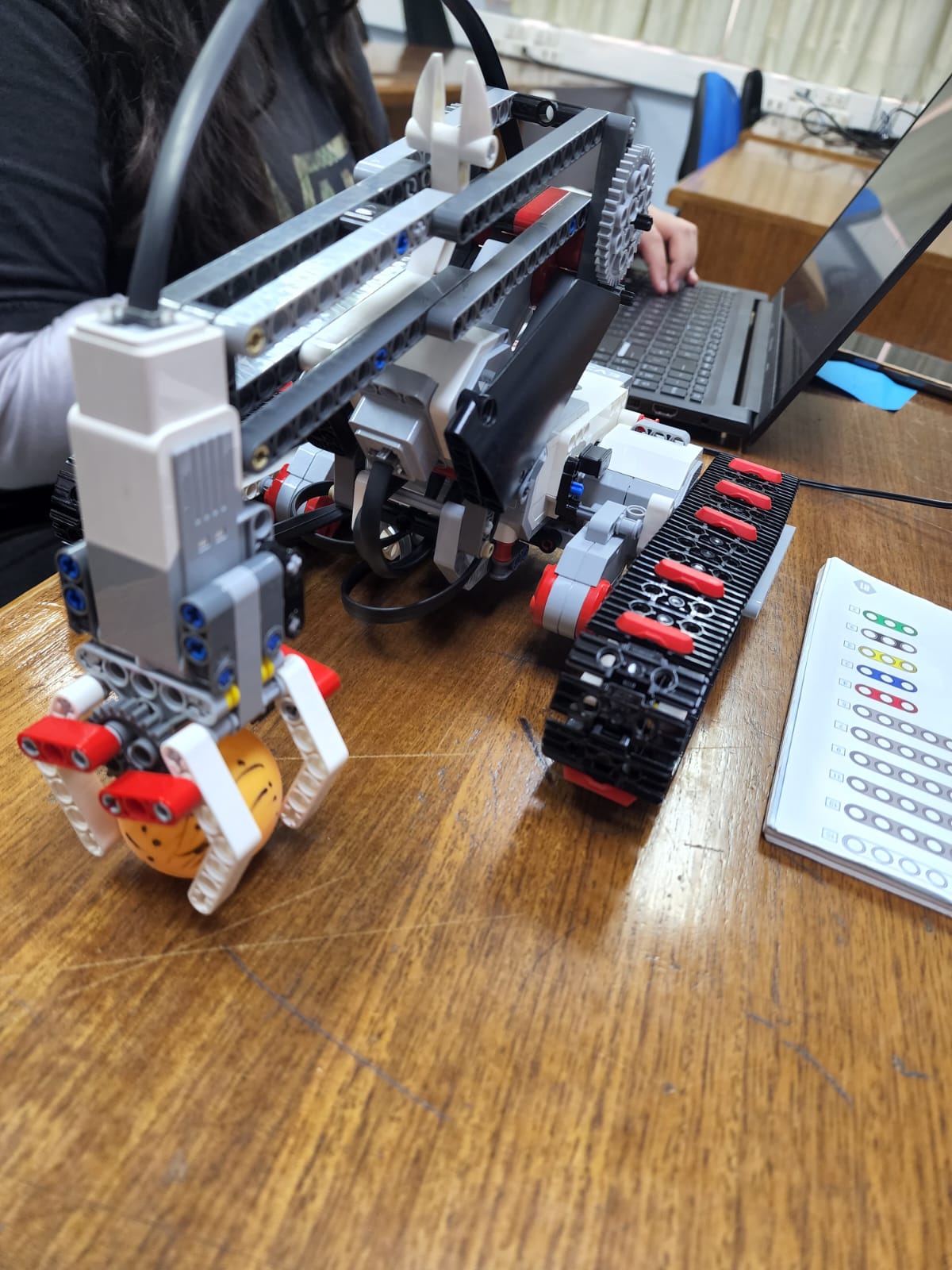
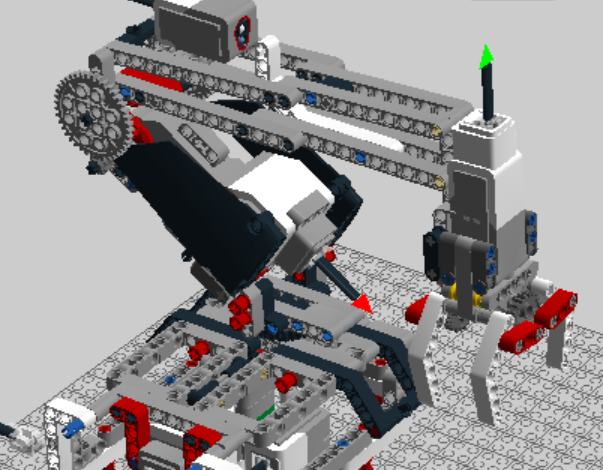
2. Garra
Mientras los codificadores continuaban experimentando con el prototipo inicial, el equipo de ensambladores avanzó con la construcción de una garra mecánica para comenzar a desarrollar un robot que cumpliera con los requerimientos del proyecto. Utilizando una guía en línea del diseño oficial correspondiente al set de piezas que teníamos disponible, llamado brazo robótico, lograron ensamblar una estructura más compleja y específica, centrada en el control de agarre y movimiento. Este modelo se armó con fin de llegar a ser la base para el modelo final.
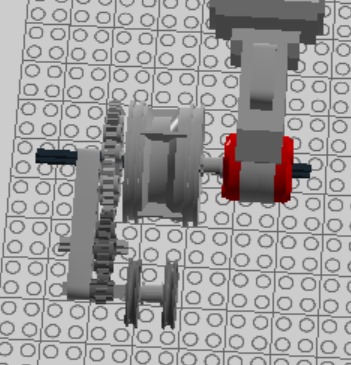
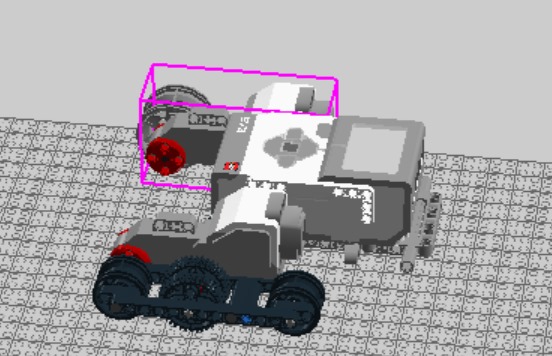
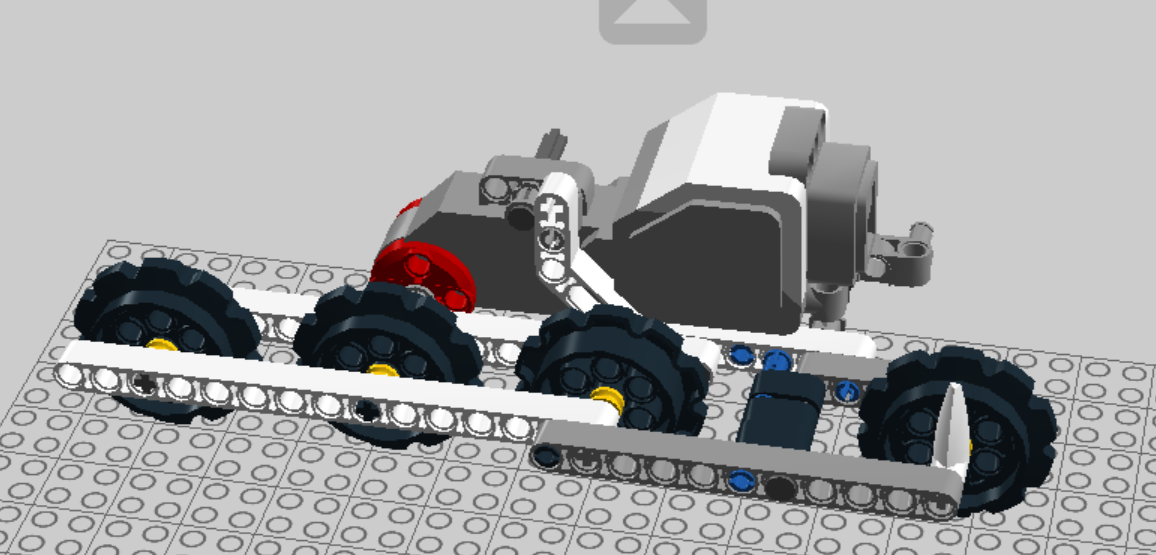
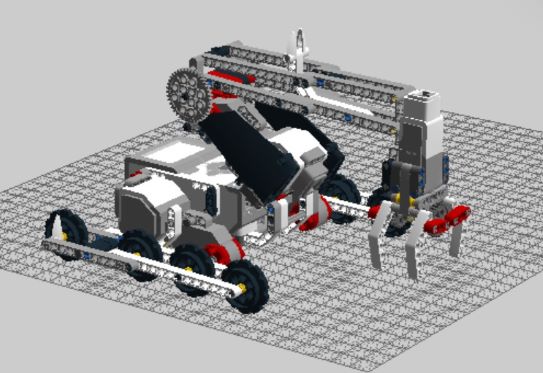
3. Modelo final
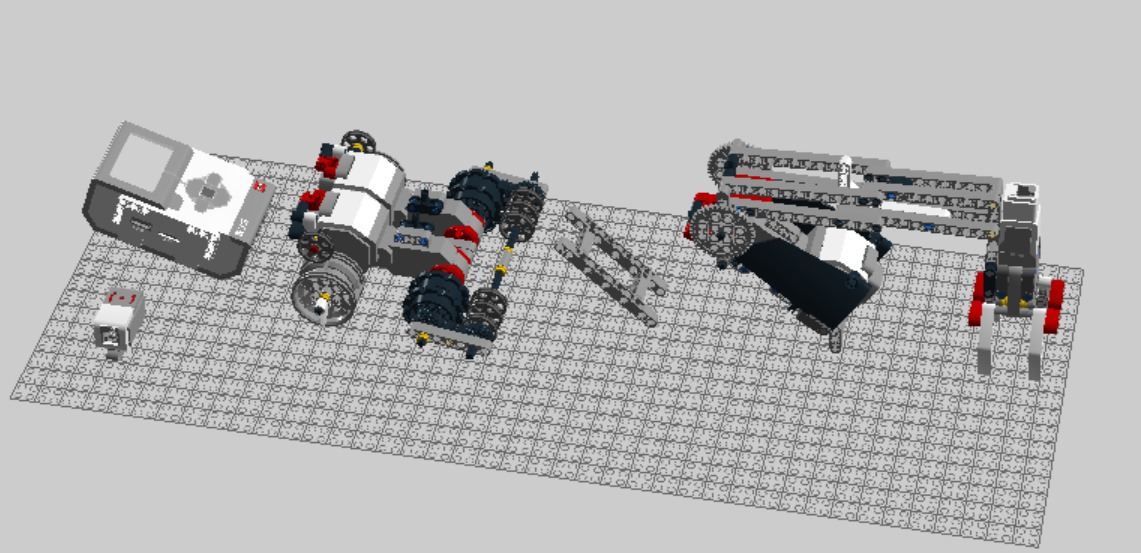
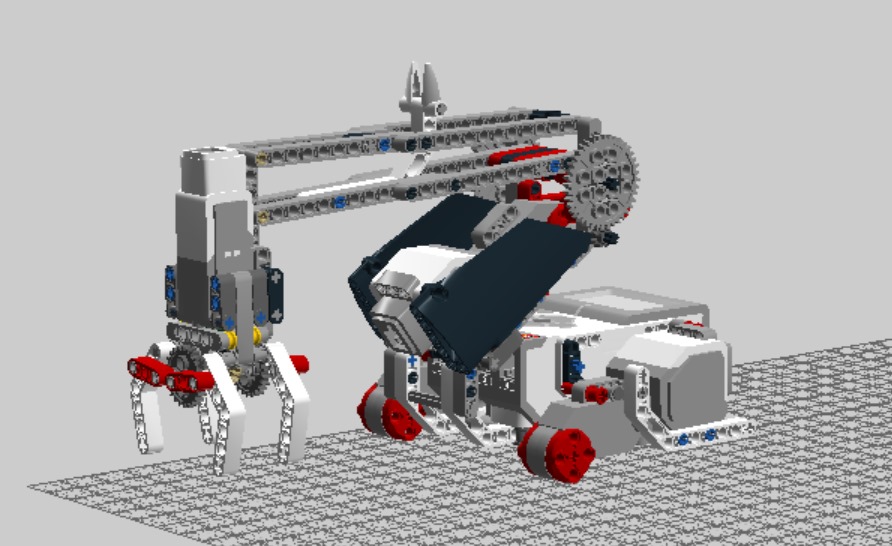
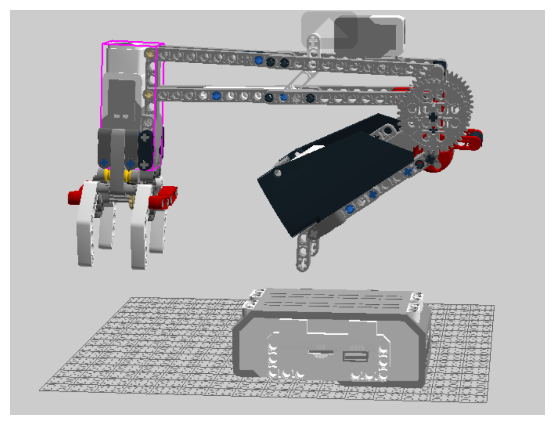
Antes de ensamblar físicamente el robot, desarrollamos un modelo 3D que nos permitió visualizar y perfeccionar el diseño antes de proceder con su construcción. Fue hecho para complementar la garra que ya teníamos armada tomando como base el modelo 3D de la garra proporcionado en línea. Pero con las limitaciones del software, el no saber qué tan estable sería al moverse y si las piezas de verdad encajaban como lo mostraban, al armarse se modificó el modelo para adaptarse a las necesidades físicas.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![IMG-20240820-WA0001[1].jpg](/redmine/attachments/download/5156/IMG-20240820-WA0001%5B1%5D.jpg){kind=link}
![IMG-20240827-WA0001[1].jpg](/redmine/attachments/download/5158/IMG-20240827-WA0001%5B1%5D.jpg){kind=link}
{kind=link}