| ⌂ | Introducción | Panorama general | Logística | Desarrollo del producto | Manual de usuario | Resultados |
Desarrollo del producto¶
Arquitectura¶
Modelos¶
Prototipo Inicial¶

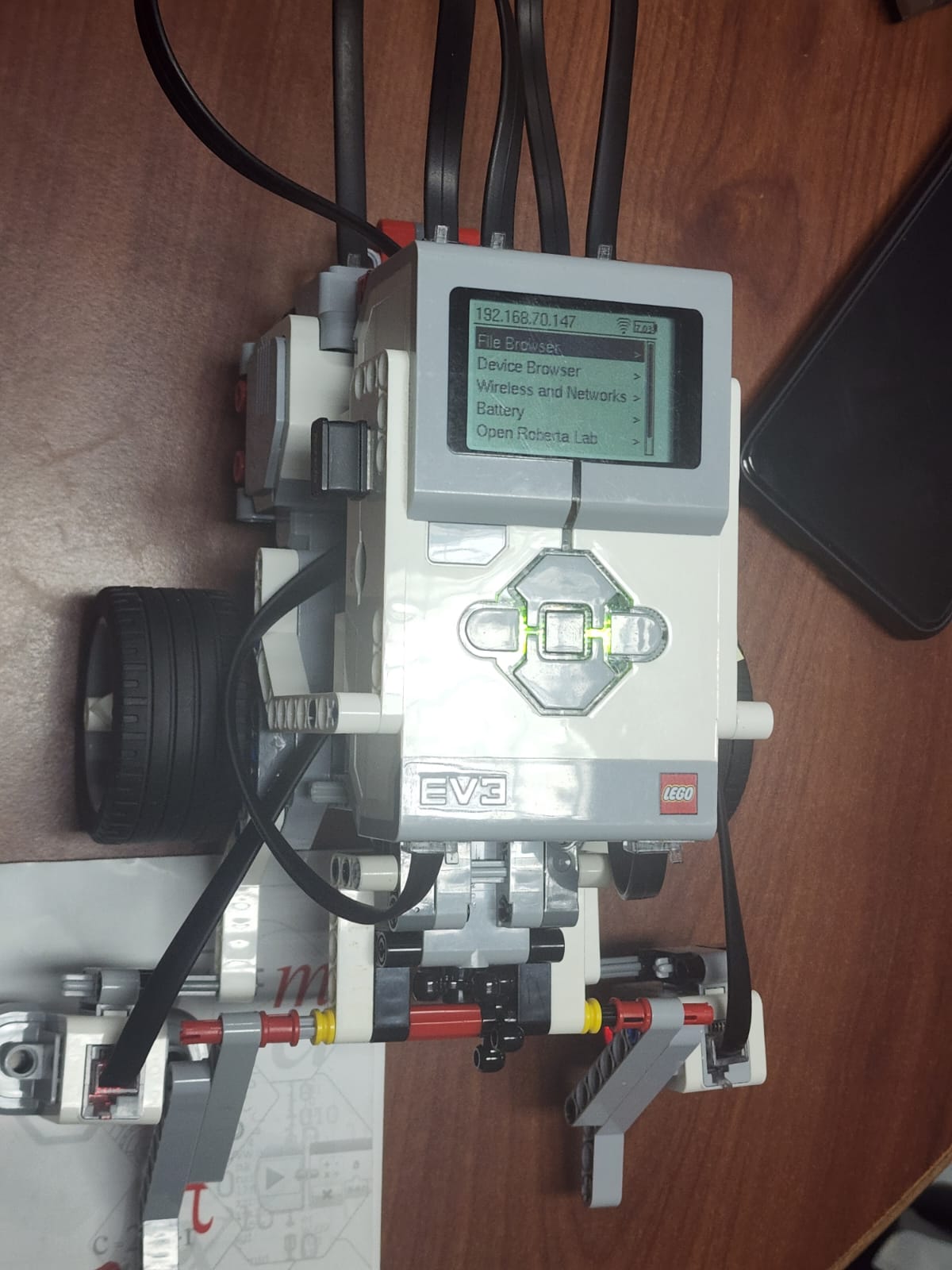
El primer modelo, denominado prototipo, fue construido siguiendo las instrucciones del manual incluido con el set de piezas. Este modelo inicial sirvió como base para familiarizarnos con el proceso de programación y las herramientas de software necesarias para el proyecto. Durante esta fase, los codificadores comenzaron a experimentar con las librerías, el entorno de desarrollo, y la interacción entre el hardware y el software. Aunque el objetivo principal de este modelo no era su diseño físico, permitió a todo el equipo ganar experiencia en la implementación de programación básica y probar las funcionalidades iniciales.
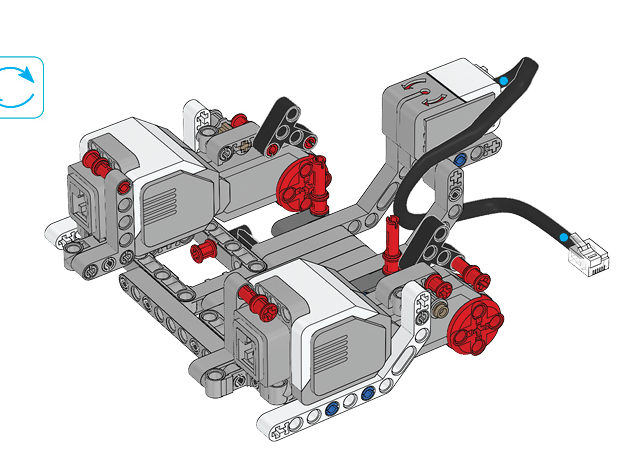
Garra¶

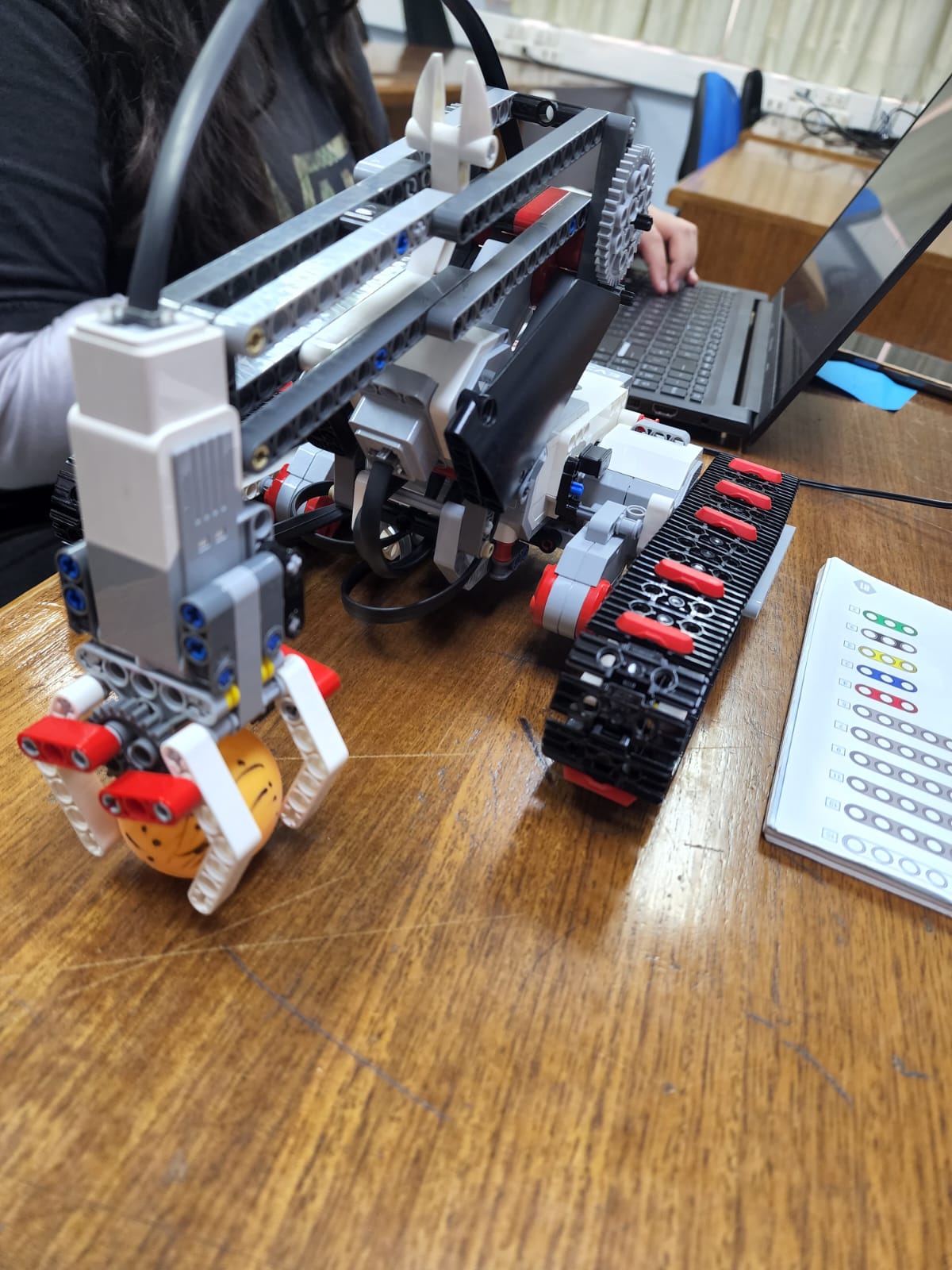
Mientras los codificadores continuaban experimentando con el prototipo inicial, el equipo de ensambladores avanzó con la construcción de una garra mecánica para comenzar a desarrollar un robot que cumpliera con los requerimientos del proyecto. Utilizando una guía en línea del diseño oficial correspondiente al set de piezas que teníamos disponible, lograron ensamblar una estructura más compleja y específica, centrada en el control de agarre y movimiento. Este modelo se armó con fin de llegar a ser la base para el modelo final.
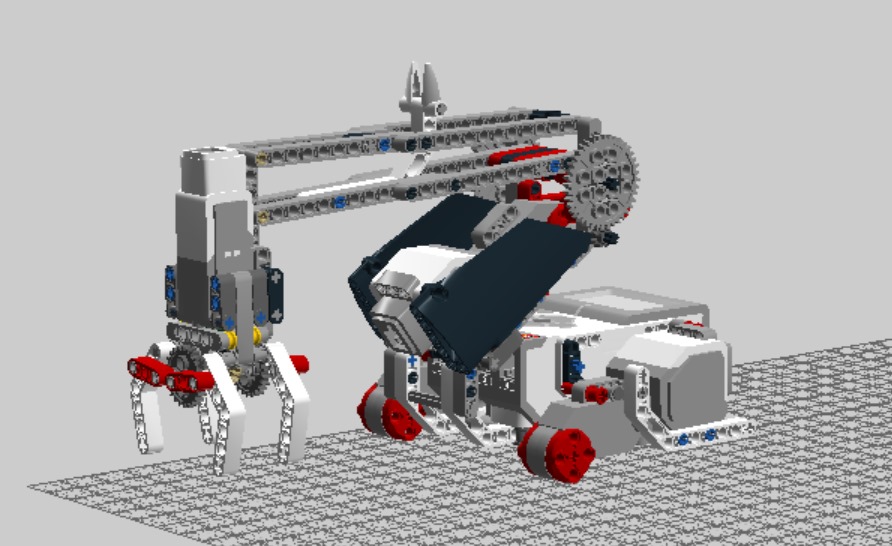
Modelo final¶
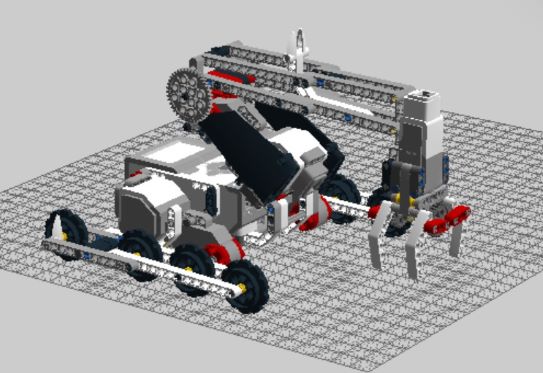
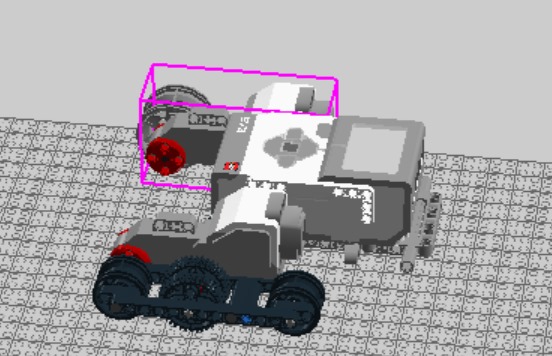
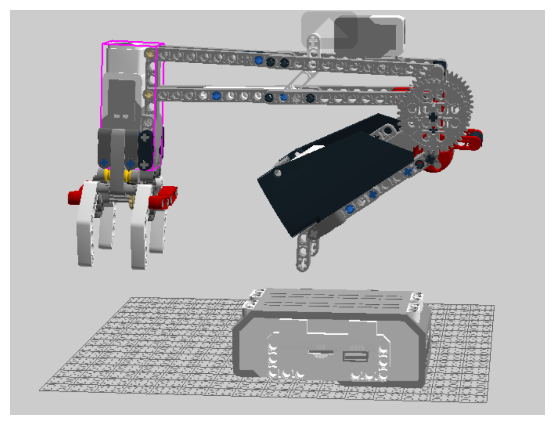
Antes de ensamblar físicamente el robot, desarrollamos un modelo 3D que nos permitió visualizar y perfeccionar el diseño antes de proceder con su construcción. Fue hecho para complementar la garra que ya teníamos armada tomando como base el modelo 3D de la garra proporcionado en línea. Pero con las limitaciones del software, el no saber qué tan estable sería al moverse y si las piezas de verdad encajaban como lo mostraban, al armarse se modificó el modelo para adaptarse a las necesidades físicas.
Diseño y Análisis¶
El desarrollo del robot comenzó siguiendo guías oficiales del mismo set, por lo que en la primera fase no requerimos de ningún análisis sobre la estructura, ya que todo estaba calculado. Después del armado del segundo modelo, al no satisfacer lo solicitado, se presentó el desafío de su adaptación.
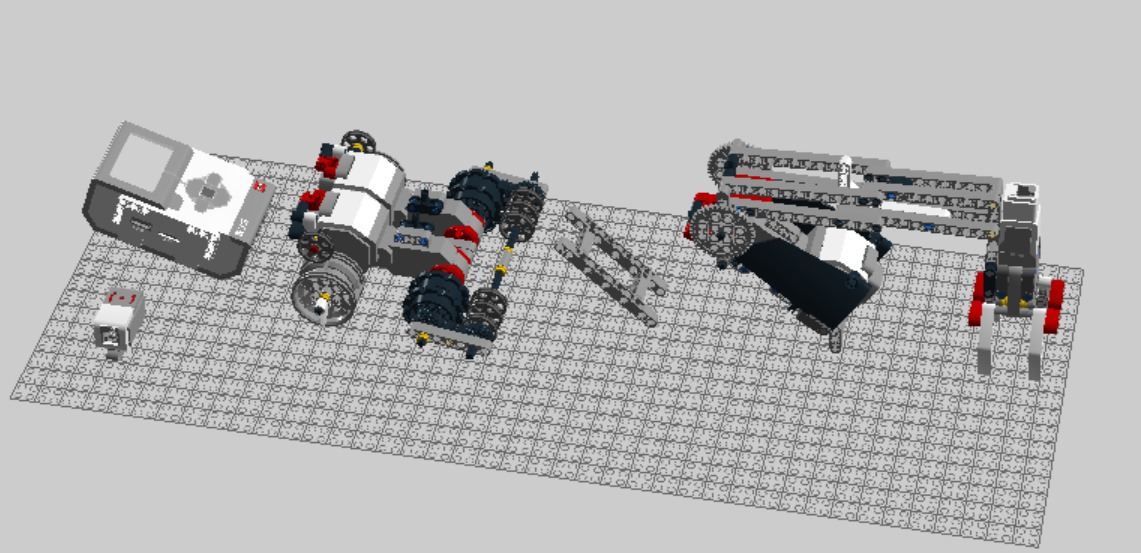
Primero que nada el modelo de la garra robótica usaba 3 puertos de los 4 disponibles para los motores, lo que nos forzó a modificar el modelo en vez de integrarlo a otro, como habíamos planeado. Por ello descartamos el motor y la base sobre los que giraba el brazo robótico, quedándonos sólo con este último. Y para diseñar una base adecuada, consideramos 3 ideas, boceteadas.
Luego para no arriesgarnos a cometer errores, decidimos por modelar el diseño antes de ensamblarlo para evaluar las posibilidades y determinar lo más adecuado, tomando como referencia el boceto con las ruedas triangulares.
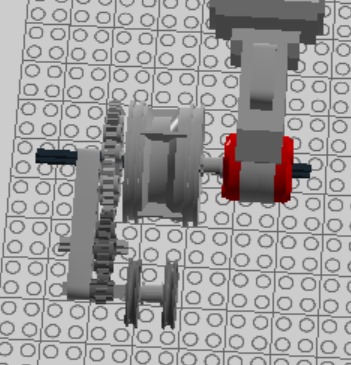
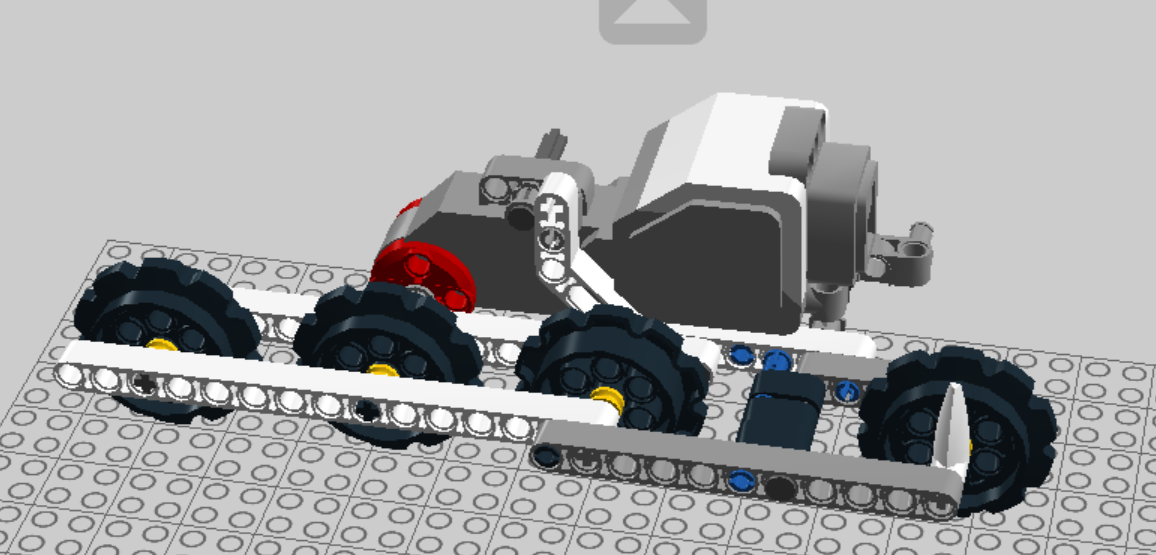
Lo primero fueron las ruedas, ya que en esos momentos era lo más importante. Para el primer planteamiento de diseño de ruedas, no se tomo como referencia ningún otro diseño, y fueron hechas para que al momento de integrar las correas, éstas tengan una forma triangular.
Algo esencial que se tuvo en cuenta es que las ruedas en la parte delantera debían extenderse por fuera del tamaño del Ev3 brick, para prevenir inclinaciones debido al posible peso que la garra pueda sostener, porque podría generarse un eje de torque por la rueda e inclinarse hacia adelante.
En este punto al no estar lo suficientemente estudiados el funcionamiento de las ruedas propuestas, el diseñador optó por investigar distintos diseños en línea, entre esto se percató que debido al brazo, el producto final se asemeja a una grúa o excavadora de construcción, y todos los modelos vistos coincidían en ruedas bajas como las de oruga, por lo que se decidió por cambiar el enfoque a unas ruedas de éste estilo. Además para complementar la decisión, investigó sobre el uso de ruedas triangulares, que son útiles para mejorar la tracción y la capacidad del robot para moverse sobre terrenos difíciles o escalar obstáculos, lo cual no es útil para el uso que se le va a dar, en cambio las ruedas de oruga o planas son mejores en superficies planas, en precisión y fluidez de movimiento.
Consideró seguir el diseño de unas ruedas, en especifico las del modelo TRACK3R, pero luego de modelarlo se determinó que este diseño no estaba hecho con las piezas que teníamos a disposición y tampoco tenia un tamaño suficiente para cumplir con el análisis mencionado recientemente sobre la inclinación, por lo que se descartó la idea.
Luego consideró el modelo Tank. La base de este modelo solucionó el problema de cómo integrar la garra a una base, pero las ruedas tampoco eran lo suficientemente largas, aún así sirvieron como inspiración para el diseño de unas adecuadas, más la integración de una técnica del modelo TRACK3R, se colocan una serie de piezas entre las ruedas, para mayor estabilidad en el modelo final.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![IMG-20240820-WA0001[1].jpg](/redmine/attachments/download/5156/IMG-20240820-WA0001%5B1%5D.jpg){kind=link}