Análisis y Diseño » History » Version 21
« Previous -
Version 21/25
(diff) -
Next » -
Current version
Sergio Huanca, 12/14/2023 08:46 AM
Índice¶
Análisis y Diseño¶
Requerimientos¶
| Funcionales | No Funcionales |
|---|---|
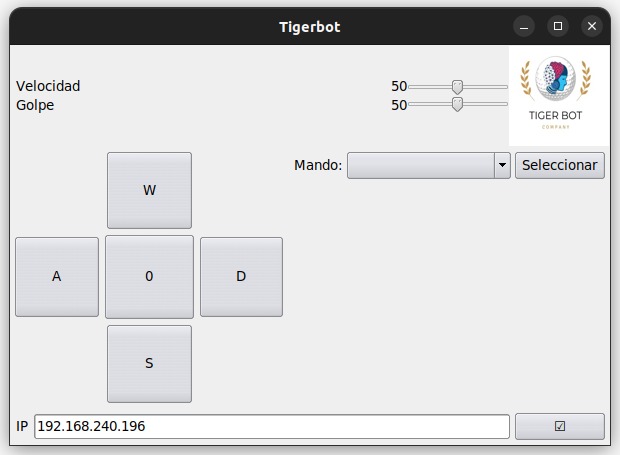
| El robot debe poder moverse | La interfaz gráfica debe contener los movimientos del robot (avanzar, retroceder, girar izquierda, girar derecha) además del tiro de golf |
| El robot debe poder golpear una pelota hacia un punto definido | La programación debe ser en Python |
| El robot debe ser controlado por una interfaz gráfica | La estructura del robot debe ser estable al igual que sus movimientos (construido con piezas del kit Lego Mindstorm EV3 Education) |
| El golpe del robot debe generar movimiento parabólico en la pelota | El robot debe poder ser controlado desde un computador con Linux |
| La interfaz gráfica debe ser de fácil entendimiento para el usuario |
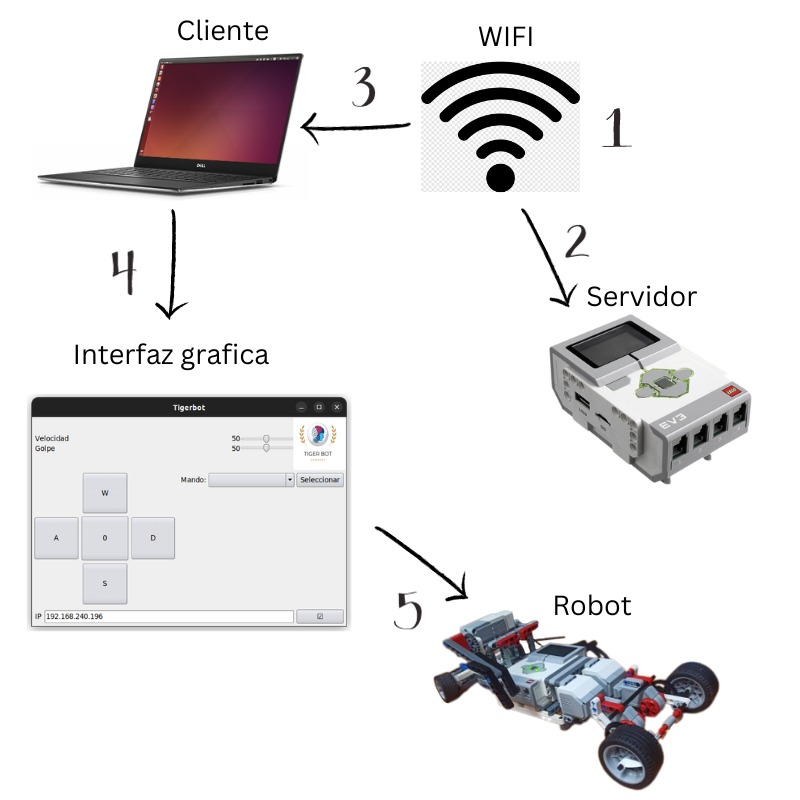
Arquitectura¶
Error executing the thumbnail macro (Attachment Arquitecturatb.jpg not found)
- Se conecta el robot y un computador a la misma red wifi
- Se inicia el servidor para conectar la interfaz
- Se abre la interfaz para controlar al robot
- La interfaz se conecta al servidor y el usuario puede controlar el robot
- El robot realiza los movimientos solicitados por el usuario gracias a la conexión entre el servidor y el computador
{kind=link}
{kind=link}