Análisis y diseño » History » Version 12
« Previous -
Version 12/15
(diff) -
Next » -
Current version
Esteban Gutierrez, 12/12/2023 06:33 PM
ㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤWikipedia¶
Error executing the thumbnail macro (Attachment LogoPASCALITO.png not found)
Grupo 3B:
Integrantes: Denis Condori, Ignacio Gallardo, Esteban Gutierrez, Fernando Klinger, Martin Salinas
Nombre del Producto: PASCALITO
Modulo: Proyecto I
Docente: Humberto Urrutia
Fecha de Inicio: 2023-08-15
Fecha de Termino: 2023-12-29
ㅤㅤㅤㅤㅤㅤㅤÍndice:
Análisis y diseño¶
Requerimientos funcionales¶
- El robot tiene que tener la capacidad de golpear una pelota con una estructura que imita a un palo.
- El robot debe tener la capacidad de moverse en todas las direcciones.
- El robot debe ser controlado por un usuario por medio del programa.
- Se requiere un servidor capaz de comunicar al programa con el usuario.
Requerimientos no funcionales¶
- La programación del software debe llevarse a cabo en el lenguaje Python y en el entorno del sistema operativo Linux.
- La interfaz debe ser eficiente y amigable con el usuario.
Arquitectura¶
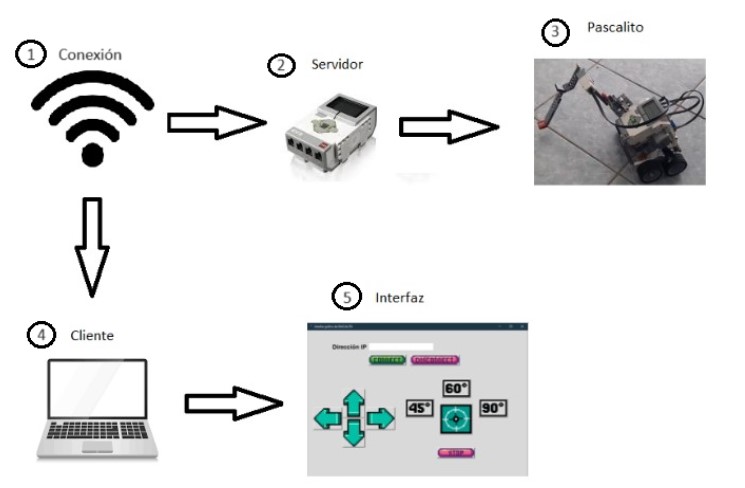
- La conexión entre el servidor y el cliente será a través de la misma red wifi.
- El servidor programado en Python se aloja en el ladrillo de comandos del ev3.
- Robot Pascalito.
- El cliente programado en Python estará en un notebook con el sistema operativo basado en Linux
- Interfaz gráfica del proyecto Pascalito programada usando la librería Tkinter.
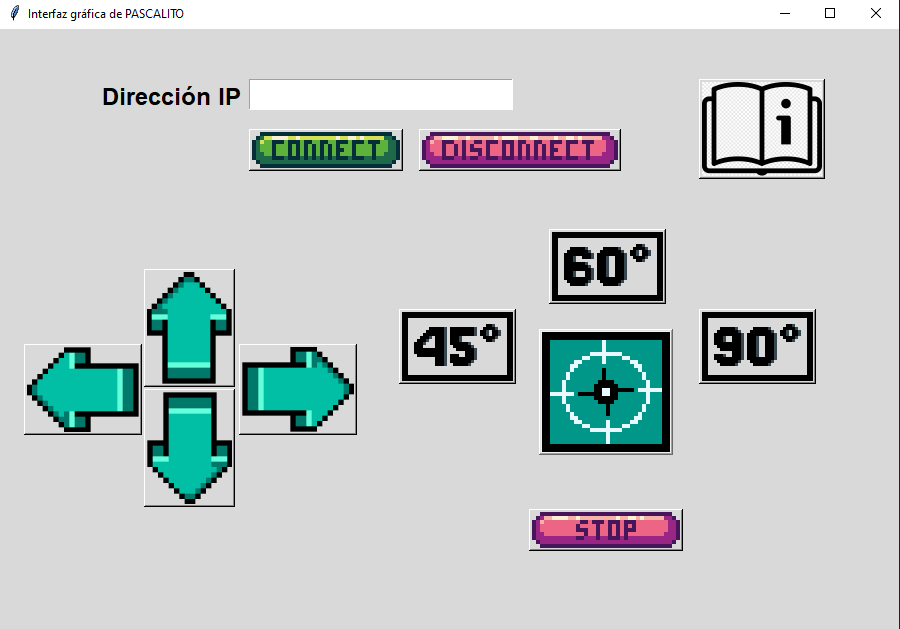
Interfaz Gráfica¶
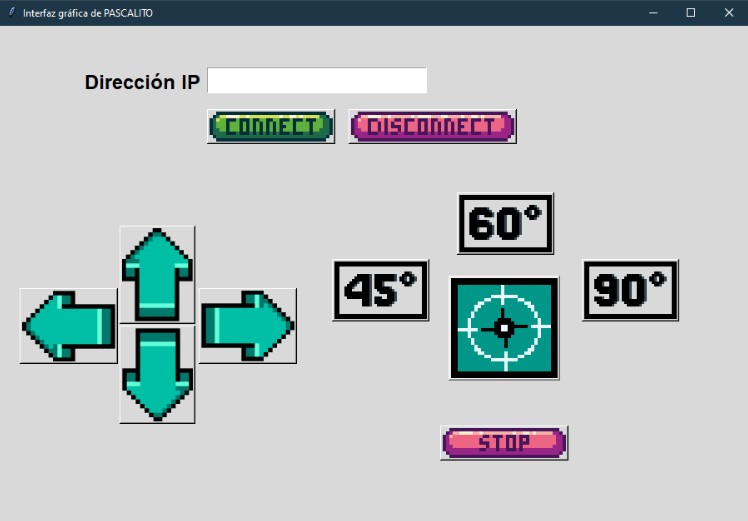
Direcciones de movimiento¶
- Flechas para indicar las direcciones en las que el robot se desplazará, es decir, ir para adelante, para atrás, girar a la izquierda y girar a la derecha.
Ángulos del golpe¶
- Botones de (45°, 60°, 90°) que tiene como función ingresar el ángulo del putter golf, para que la pelota obtenga un recorrido distinto
Golpe a la pelota¶
- Símbolo “icono de mira” que logra pegarle a la pelota.
Conexión¶
- Botón “Connect” el cual vincula al cliente a través de la IP del servidor que está en el EV3
- Botón de “Disconnect” que permite cerrar la conexión y el de “Stop” permite detener el robot.
Implementación¶
Física detrás del golpe de golf:¶
Leyes de Newton:¶
- Primera ley de Newton (Inercia): Un objeto en reposo tiende a permanecer en reposo, y un objeto en movimiento tiende a permanecer en movimiento a una velocidad constante en línea recta, a menos que una fuerza neta actúe sobre él. Esto se aplica a la pelota de golf cuando está quieta en el tee y cuando se mueve a lo largo del recorrido
- Segunda ley de Newton (Fuerza y aceleración): La aceleración de un objeto es directamente proporcional a la fuerza neta que actúa sobre él, e inversamente proporcional a su masa. En el mini golf, la fuerza aplicada al golpear la pelota con el putter determina su aceleración y trayectoria.
- Tercera ley de Newton (Acción y reacción): Por cada acción hay una reacción igual y opuesta. Cuando el putter golpea la pelota, la pelota aplica una fuerza igual y opuesta al putter.
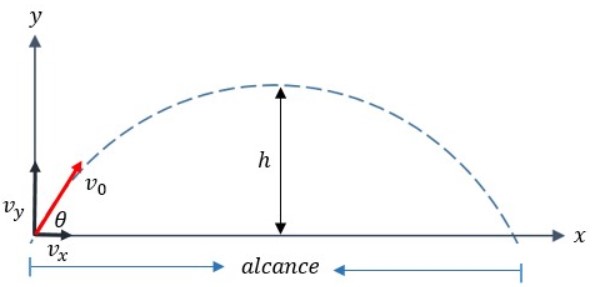
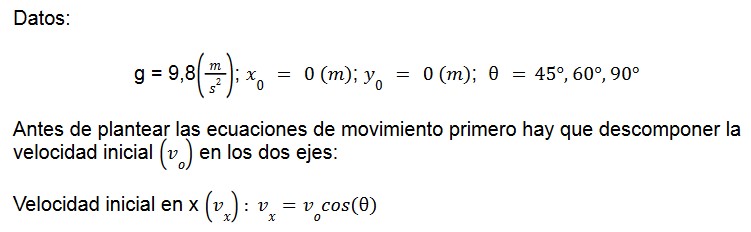
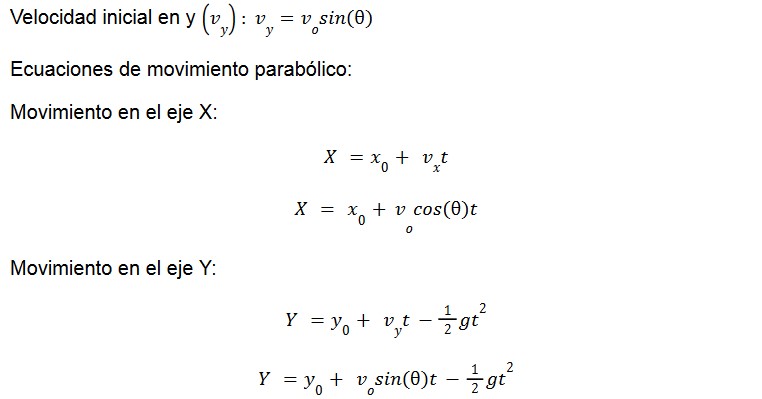
Fundamentos de Proyectiles o movimiento parabólico:¶
La trayectoria de la pelota de golf sigue las leyes de la física de los proyectiles. El ángulo y la fuerza con los que golpeas la pelota afectan su trayectoria. Un ángulo y una fuerza precisos pueden permitir que la pelota alcance el hoyo.
Ficheros
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}