Análisis y diseño » History » Version 10
« Previous -
Version 10/15
(diff) -
Next » -
Current version
Esteban Gutierrez, 12/12/2023 06:13 PM
ㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤWikipedia¶
Error executing the thumbnail macro (Attachment LogoPASCALITO.png not found)
Grupo 3B:
Integrantes: Denis Condori, Ignacio Gallardo, Esteban Gutierrez, Fernando Klinger, Martin Salinas
Nombre del Producto: PASCALITO
Modulo: Proyecto I
Docente: Humberto Urrutia
Fecha de Inicio: 2023-08-15
Fecha de Termino: 2023-12-29
ㅤㅤㅤㅤㅤㅤㅤÍndice:
Análisis y diseño¶
Requerimientos funcionales¶
- El robot tiene que tener la capacidad de golpear una pelota con una estructura que imita a un palo.
- El robot debe tener la capacidad de moverse en todas las direcciones.
- El robot debe ser controlado por un usuario por medio del programa.
- Se requiere un servidor capaz de comunicar al programa con el usuario.
Requerimientos no funcionales¶
- La programación del software debe llevarse a cabo en el lenguaje Python y en el entorno del sistema operativo Linux.
- La interfaz debe ser eficiente y amigable con el usuario.
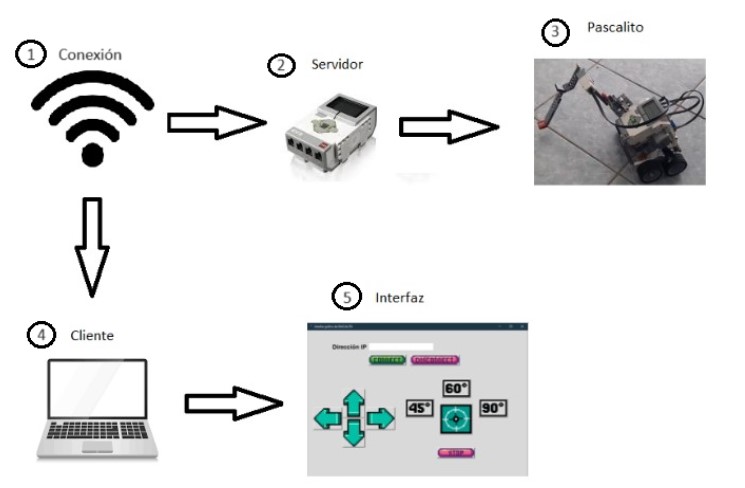
Arquitectura¶
- La conexión entre el servidor y el cliente será a través de la misma red wifi.
- El servidor programado en Python se aloja en el ladrillo de comandos del ev3.
- Robot Pascalito.
- El cliente programado en Python estará en un notebook con el sistema operativo basado en Linux
- Interfaz gráfica del proyecto Pascalito programada usando la librería Tkinter.
(IMAGEN DE REFERENCIA)
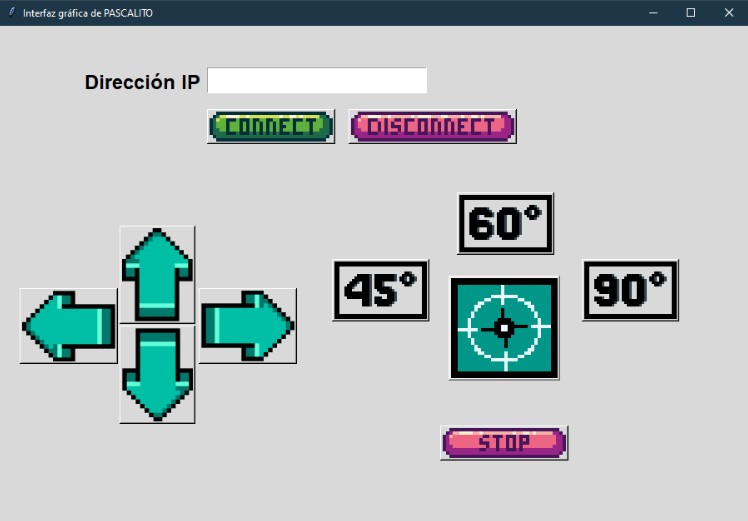
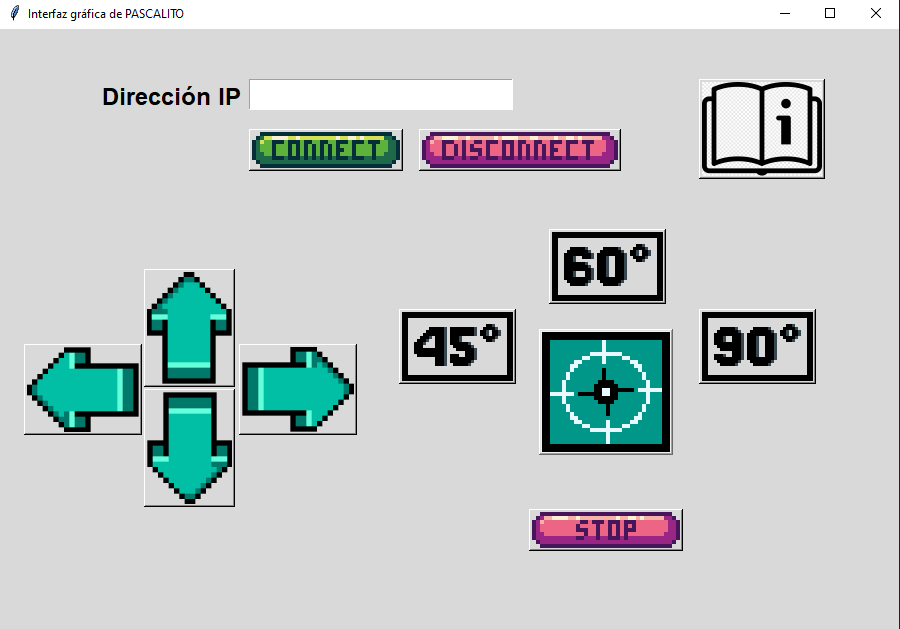
Interfaz Gráfica¶
(FOTO INTERFAZ)
Direcciones de movimiento¶
- Flechas para indicar las direcciones en las que el robot se desplazará, es decir, ir para adelante, para atrás, girar a la izquierda y girar a la derecha.
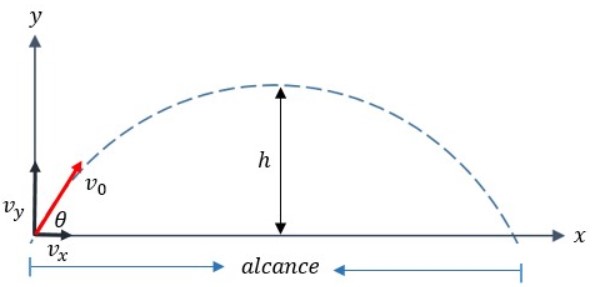
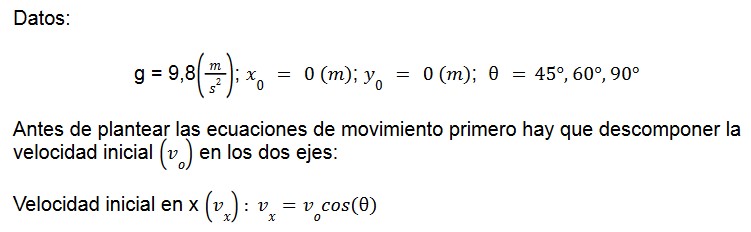
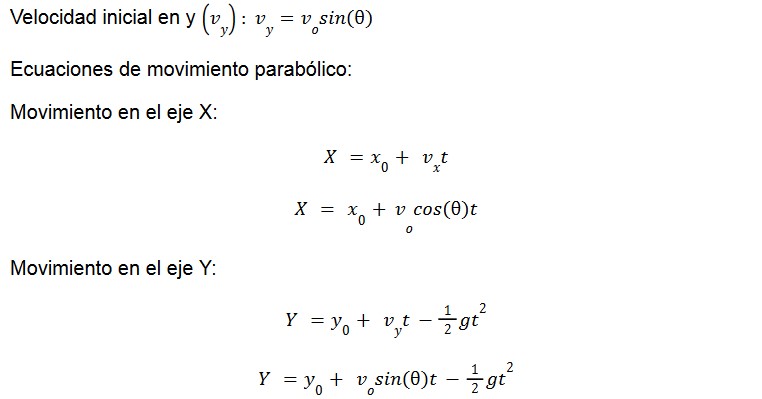
Ángulos del golpe¶
- Botones de (45°, 60°, 90°) que tiene como función ingresar el ángulo del cutter golf, para que la pelota obtenga un recorrido distinto
Golpe a la pelota¶
- Símbolo “icono de mira” que logra pegarle a la pelota.
Conexión¶
- Botón “Connect” el cual vincula al cliente a través de la IP del servidor que está en el EV3
- Botón de “Disconnect” que permite cerrar la conexión y el de “Stop” permite detener el robot.
Error executing the thumbnail macro (Attachment Avance1.JPEG not found)
Error executing the thumbnail macro (Attachment Avance2.JPEG not found)
Error executing the thumbnail macro (Attachment Avance3.JPEG not found)
Ficheros
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}