Wiki » History » Version 64
« Previous -
Version 64/119
(diff) -
Next » -
Current version
Esteban Ovando, 11/08/2018 10:58 AM
Proyecto Rubik PENG¶
Integrantes y Roles¶
| Integrates | Rol | Descripción |
|---|---|---|
| Pedro Araya A. | Lider | Organiza el equipo e inspecciona el avance del proyecto. |
| Nicolás Colque M. | Programador | Diseñar los algoritmos del robot y la interfaz para la comunicación remota con el robot. |
| Gabriel Echeverria C. | Secretario | Encargado de realizar los informes de avances, bitácoras y publicación de los avances. |
| Esteban Ovando L. | Ensamblador | Encargado de ensamblar el robot. |
Objetivo General¶
- Armar un robot que realice algoritmos en un cubo Rubik y que opere mediante una interfaz remota.
Objetivos Especificos¶
- Estudiar los diseños de robots LEGO.
- Armar un Robot Lego de acuerdo al diseño que se escogió y comprobar si los movimientos que debe realizar estén funcionando correctamente.
- Estudiar los patrones de movimientos de Cubo Rubik.
- Desarrollar un pseudocodigo con los patrones de movimientos del Cubo rubik estudiados.
- Codificar el pseudocódigo al lenguaje de programación Python.
- Diseñar un bosquejo de la Interfaz remota.
- Estudiar las plataformas de desarrollo de una interfaz de control remota.
- Desarrollar la Interfaz de control remota que permita al robot moverse mediante control remoto desde el celular.
- Prueba y Análisis de resultados.
Estimación de Costos¶
|_.Productos|_.Cantidad|_.Costo|
|_.Cubo Rubik|_.1 unidad|_.$10.000|
|_.Red Wireless Usb TP-Link|_.1 unidad|_.$9.000|
|_.Kit de Lego Mindstorms(EV3)|_.1 unidad|_.$500.000|
|_.Micro SD 8GB (kingston)|_.1 unidad|_.$7.000|
|_.Hora trabajo|_.1 hora|_.$9.000|
|_.Hora trabajo x persona|_.9000 * 4 personas|_.$36.000|
|_.Hora Totales|_.72 hrs * 36000|_.$2.592.000|
|_.Hora Extra|_.1 hora|_.$13.000|
|_.Hora Extra x persona|_.13.000 * 4 personas|_.$52.000|
|_.Horas Extras|_.32 hrs * 52.000|_.$3.744.000|
|||_.Total: $6.972.000|
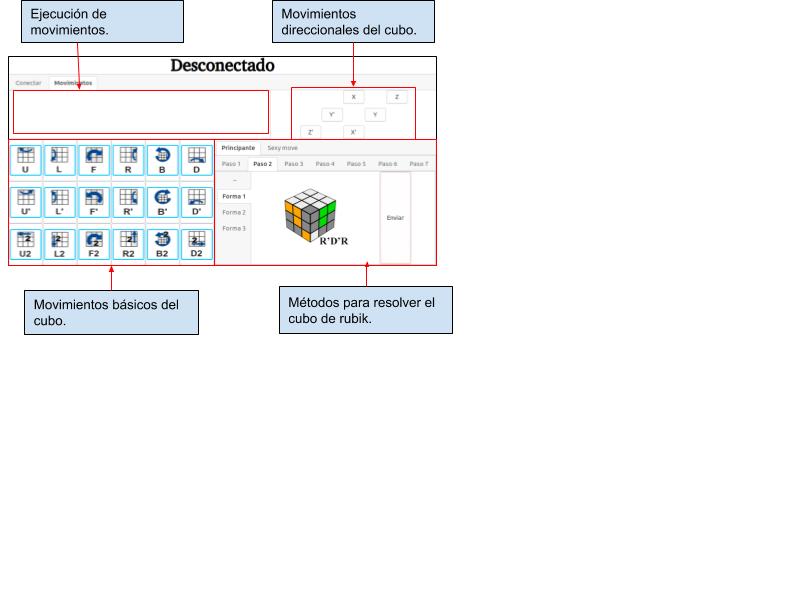
La interface tiene como proposito enlazar conexion al robot(EV3), para que el usuario pueda elegir el movimiento deseado.
 |
 |
 |
 |
|---|---|---|---|
| U | D | M | B |
 |
 |
 |
 |
| U(prima) | D(prima) | M(prima) | B(prima) |
 |
 |
 |
|---|---|---|
| R | F | L |
 |
 |
 |
| R(prima) | F(prima) | L(prima) |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}