Wiki » History » Version 13
« Previous -
Version 13/20
(diff) -
Next » -
Current version
Sebastian Lukich, 12/13/2019 05:55 PM
PROYECTO 1:
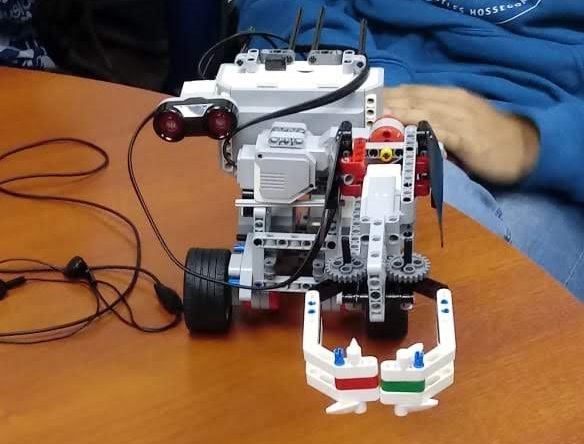
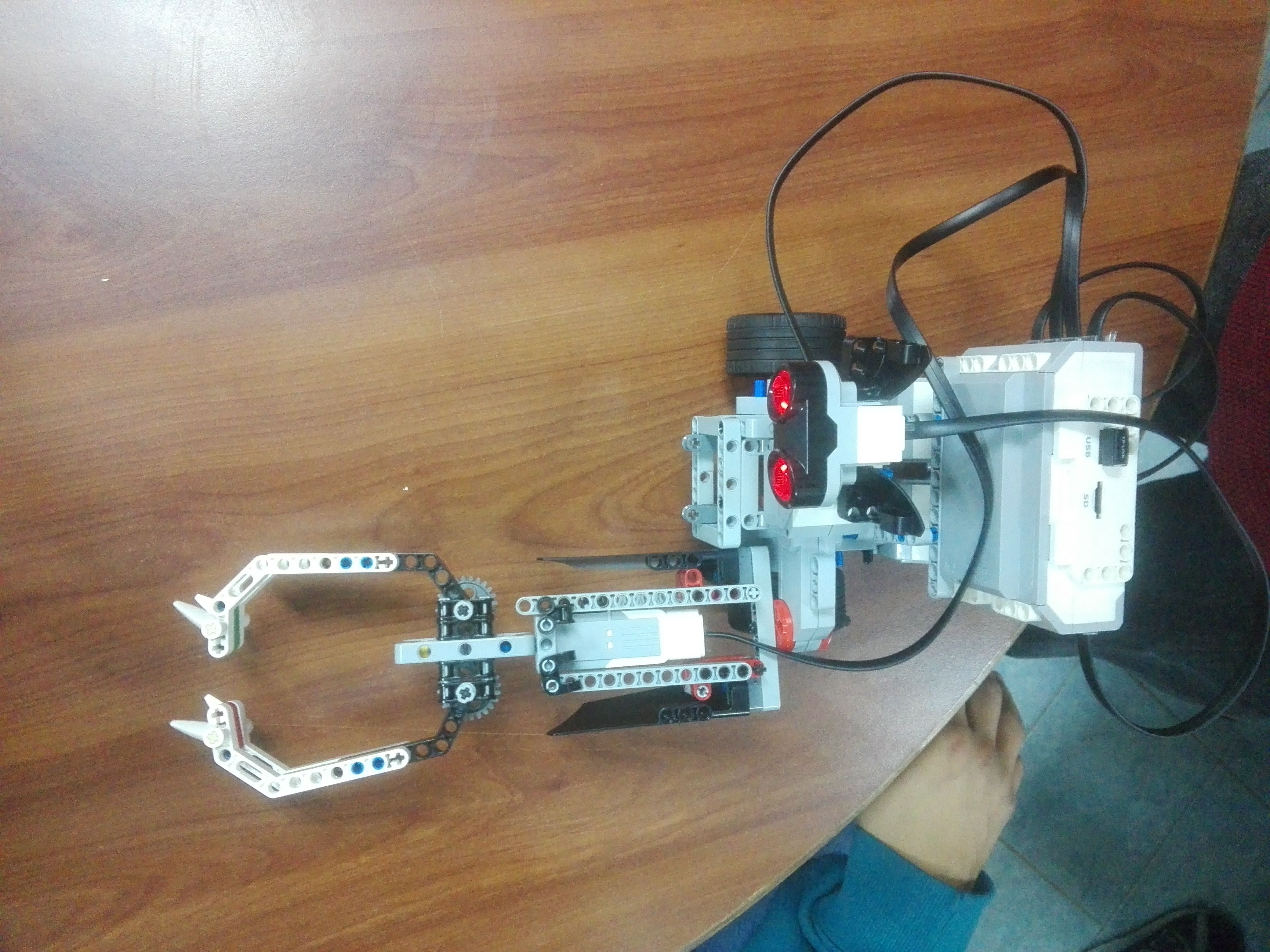
Arturi-toe.
*Integrantes:* -Mauricio Mamani. -Javier Mamani. -Julio Rivera. -Sebastian Lukich. -Rodrigo Carvajal.
Objetivo general:
Construir robot lego que sea capaz de responder a las órdenes del usuaria para poder jugar FLIP-TAC-TOE
- Diseñar modelo de robot que que se adecue a las funcionalidades pedidas.
- Implementar código en Python de controles de movimiento, giro de garra, estado de la
garra. - Habilitar la conexión remota por wifi usando USB Dongle para realizar interfaz de control
del robot en la computadora portátil. - Realizar pruebas y ejecución del robot habilitando un espacio adecuado.
- Realizar material de apoyo del proyecto, en específico, informe, manual de uso, video de
guía, wiki del proyecto.
- El código de control del robot se desarrollará usando sólo lenguaje Python.
- El diseño del modelo del robot sólo usará combinaciones de las piezas de Lego
Mindstorm Ev3 más aquellas mandadas a hacer por la impresora 3D. - El diseño del modelo del robot sólo usará combinaciones de las piezas de Lego
Mindstorm Ev3 más aquellas mandadas a hacer por la impresora 3D. - El proyecto se culminará en un tiempo no mayor a un semestre académico.
Estimación de costos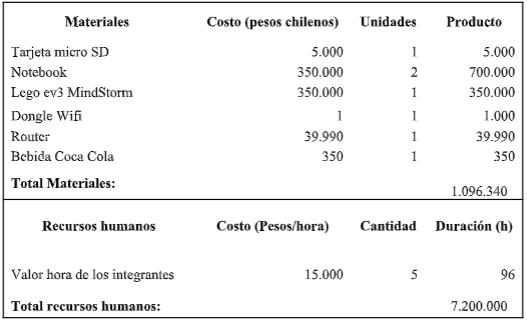
Interfaz de control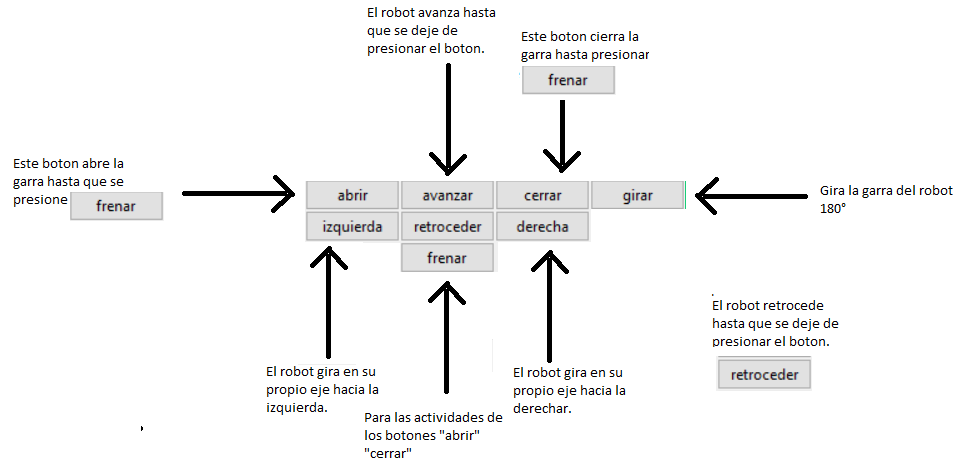
{kind=link}
{kind=link}
{kind=link}
{kind=link}