Análisis - Diseño » History » Version 13
« Previous -
Version 13/16
(diff) -
Next » -
Current version
Melisa Laura, 12/21/2023 04:40 PM
Índice:
Análisis - Diseño¶
Especificación de requerimientos¶
Requerimientos funcionales:
- Desarrollar un robot que se comunique vía wifi y permita al usuario controlarlo mediante una interfaz gráfica en Python.
- Capacidad para moverse en direcciones hacia adelante, atrás, izquierda y derecha.
- La interfaz gráfica debe ofrecer opciones específicas para acciones como desplazarse, mover el soporte de la bola y realizar el lanzamiento.
Requerimientos NO funcionales
- El proyecto debe incluir un manual detallado con instrucciones completas sobre el funcionamiento integral del robot.
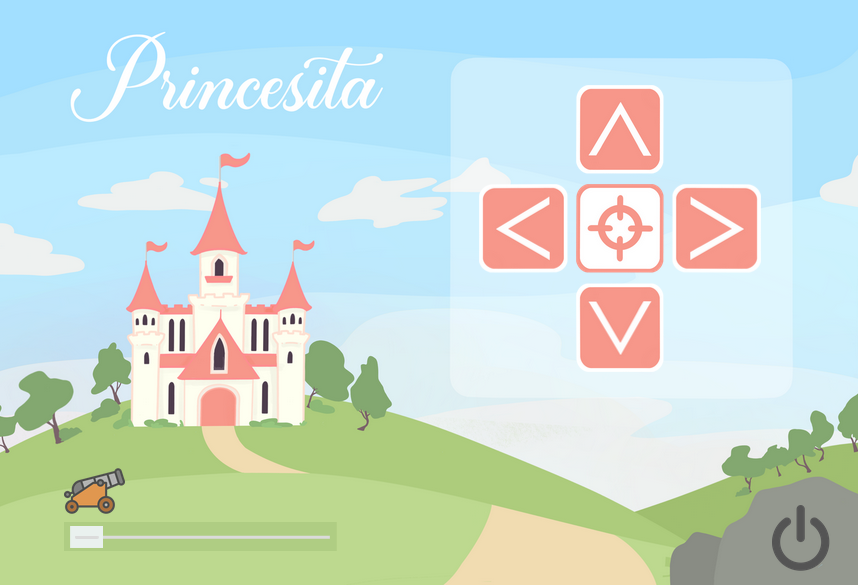
- La interfaz gráfica debe contar con botones específicos para controlar el desplazamiento del robot, una sección para ajustar la rotación del palo de golf y un botón para controlar la posición de la base que sostiene la bola.
Arquitectura¶
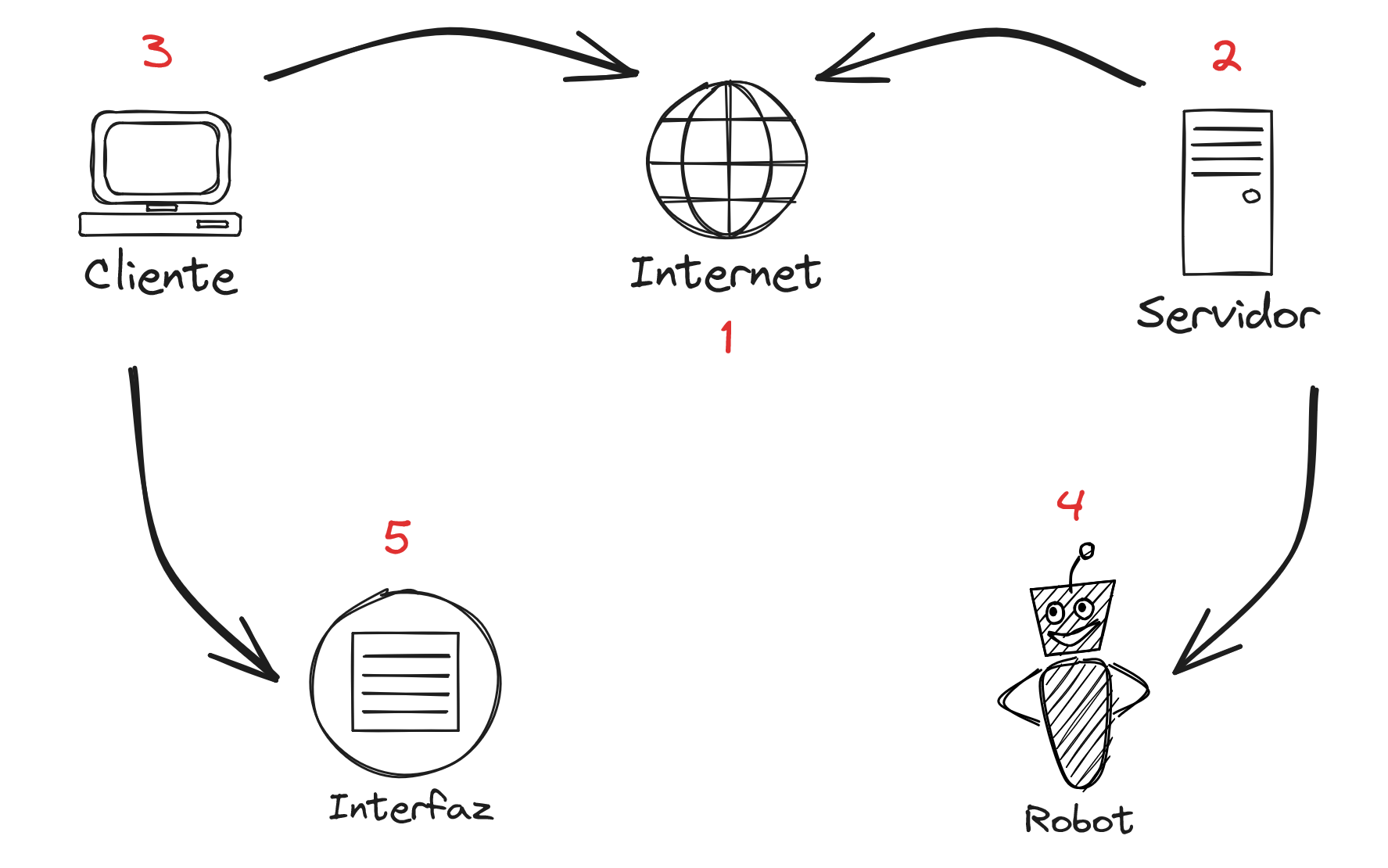
Interfaz¶
Fundamentos de Proyectiles¶
Tenemos conocimiento de que la pelota realiza un movimiento parabólico . A continuación, se utilizarán las fórmulas correspondientes para calcular el tiempo de vuelo del proyectil. Cabe recalcar, que para este ejercicio, la aceleración de gravedad tiene un valor aproximado de 9.8 m/s
- Calculamos la velocidad con la que el palo golpea la bola usando los conceptos de energía
h = 0.25mEma = Emb
mgh = mv2/2
v = (2gh)1/2
v = 2.213 m/s
- Aplicando el conceptos de colisiones podemos saber la velocidad de la bola al momento de que el palo impacta con esta
Mpelota = 0.05Kg
Mpalo = 0.1KgPi = Pf
Mpalo * Vpaloi + Mpelota * Vpelotai = Mpalo * Vpalof + Mpelota * Vpelotaf
Mpalo * Vpaloi= Mpalo * Vpalof + Mpelota * Vpelotaf
Vpalof = Vpelotaf = Vf
Vf = Mpalo * Vpaloi / (Mpalo + Mpelota)
Vf = 1.25 m/s
- Ahora aplicamos los conceptos para analizar un movimiento parabólico con los datos obtenidos
{kind=link}
{kind=link}