Introducción » History » Version 76
« Previous -
Version 76/152
(diff) -
Next » -
Current version
Vranika Santiago, 11/24/2022 09:42 PM
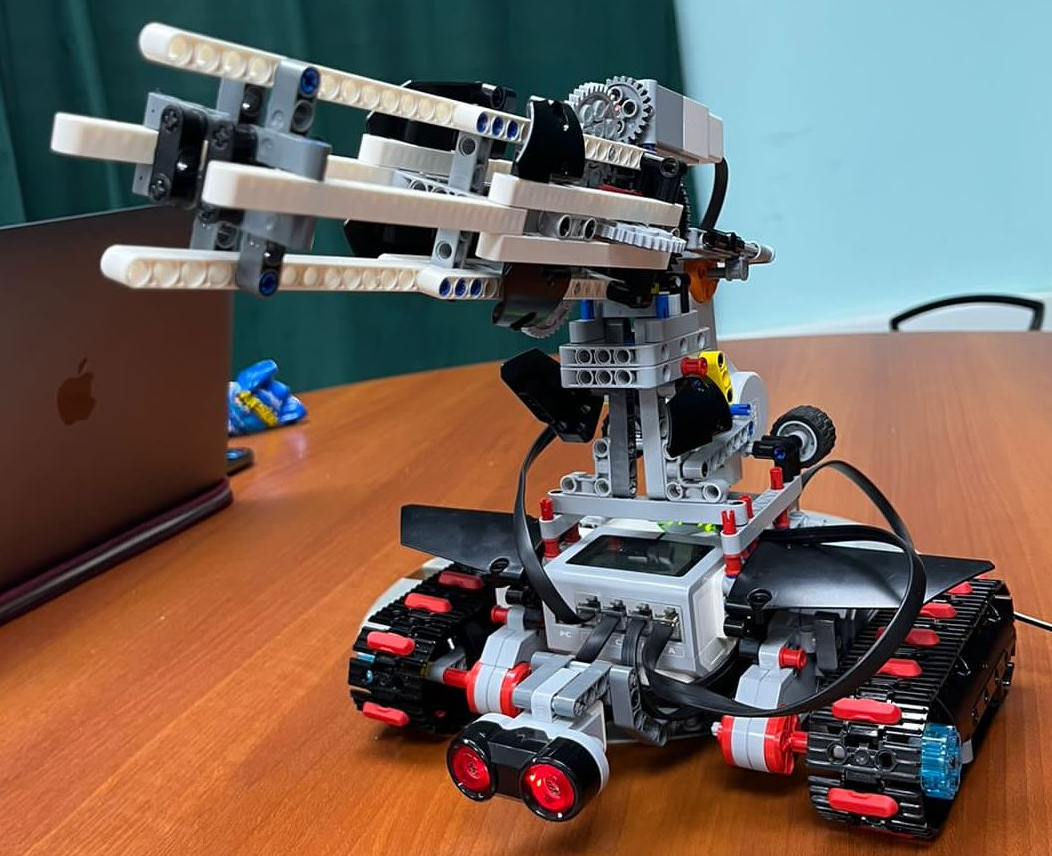
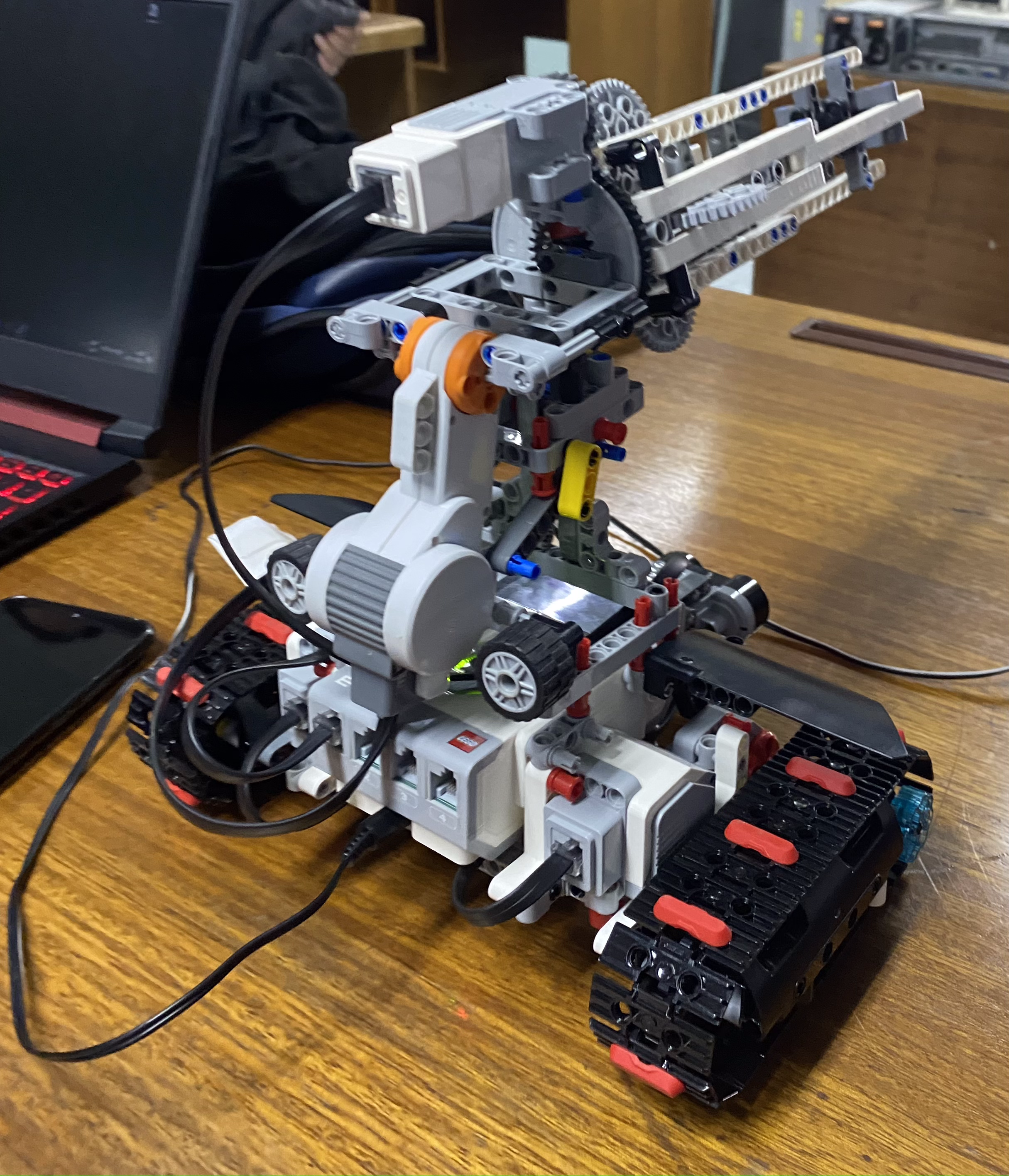
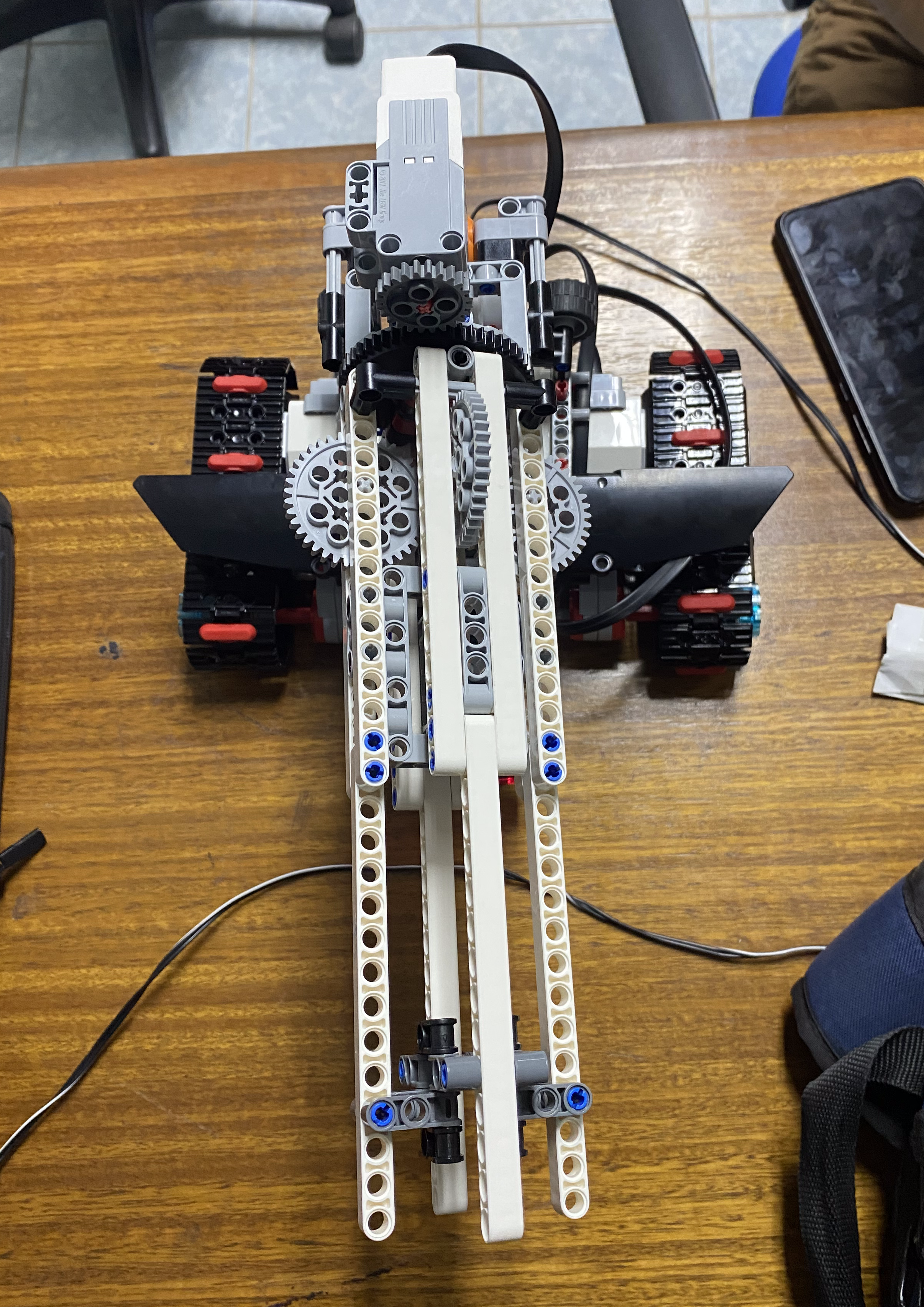
PROYECTO: Gorilla-Tank MK ll
 ¶
¶
INTEGRANTES
- García Arancibia Brayan Ignacio
- Huanca Calle Luis Francisco
- Pailamilla Peréz Gabriel Antonio
- Santiago Yovich Vranika Fernanda
- Vera Norambuena Luciano Raúl
OBJETIVO GENERAL¶
- El objetivo general de la actividad es desarrollar y construir un robot EV3 que tiene la funcionalidad de disparar proyectiles a través de una interfaz gráfica programada en Python.
OBJETIVOS ESPECÍFICOS¶
- Estudiar la librería Tkinter que ofrece Python para hacer interfaces gráficas de usuarios.
- Crear una interfaz gráfica de usuario que esté capacitada para enviar instrucciones remotamente hacia el robot EV3.
- Aplicar los contenidos vistos el semestre pasado en la asignatura Mecánica clásica acerca del movimiento de proyectiles y luego hacer predicciones en base a las fórmulas dadas.
| RESTRICCIÓN | DESCRIPCIÓN |
|---|---|
| Tiempo | Fecha límite para hacer proyecto. |
| Set Lego EV3 | Utilización sólo del kit LEGO MINDSTORM EV3 |
| Temática | Debe tener un cañón que dispare |
| Control | El robot tiene que ser controlado a distancia |
| Plataforma de documentación | Todos los archivos redactados serán subidos a Redmine |
GESTIÓN DE RIESGOS¶
Niveles de impacto:
1. CATASTRÓFICO
2. CRÍTICO
3. CIRCUNSTANCIAL
4. IRRELEVANTE
| RIESGOS | PROBABILIDAD DE CONCURRENCIA | NIVEL DE IMPACTO | ACCION REMEDIAL |
|---|---|---|---|
| Desarme del robot a causa de una caida. | 40% | 2 | Volver a construir el robot. |
| Daño o perdida de la tarjeta SD. | 10% | 1 | Comprar otra tarjeta SD y respaldar la informacion |
| Escasez de piezas. | 80% | 3 | Ir a buscar las piezas faltantes o reemplazarla por una similar. |
| Enfermedad o inconveniente del personal | 40% | 3 | Un integrante del grupo se encargara temporalmente de las tareas del personal faltante |
| Reconstrucción total del robot por incompatibilidad de lo requerido en el proyecto. | 25% | 1 | Buscar nuevas ideas acorde a lo pedido y llevarlas a cabo. |
| Incumplimiento de tareas. | 20% | 2 | Reorganizar los roles del grupo para asignar el mas opimo y establecer fechas limites de trabajo. |
| Pocas horas Autonomas | 10% | 2 | Mejorar la comunicacion y motivar a los integrantes del grupo buscando horarios disponible para todos. |
| Descarga de bateria del EV3. | 35% | 4 | Cargar la bateria, mientras el EV3 no sea utilizado. |
ARQUITECTURA¶

1. El robot y el notebook deben estar conectados a la misma red Wifi.
2. Iniciar el archivo Server.py para así obtener la conexión remota con el notebook.
3. El usuario debe iniciar la interfaz gráfica para controlar el robot a distancia.
4. La interfaz se conectará al servidor del robot y el usuario podrá controlarlo.
5. Robot que realizará los movimientos enviados por el usuario gracias al servidor establecido entre sí mismo y el notebook del usuario.
INTERFAZ¶

- Flechas para indicar las direcciones en las que el robot se desplazará, es decir, ir para adelante, para atrás, girar a la izquierda y girar a la derecha.
- Botón “Ingresar” que tiene como función ingresar el ángulo del cañón, en el cual en la parte de arriba se puede encontrar el símbolo de un ángulo.
- Botón “Disparar” que logra disparar el proyectil.
- Botón “Conectar” el cual vincula al cliente a través de la IP del servidor que está en el EV3.
- Logo característico del robot construido junto a su nombre.
- Botón con el símbolo de on – off que permite salir del programa, en cualquier momento.
{kind=link}
{kind=link}
{kind=link}
{kind=link}