Introducción » History » Version 39
« Previous -
Version 39/152
(diff) -
Next » -
Current version
luciano vera, 10/18/2022 09:07 AM
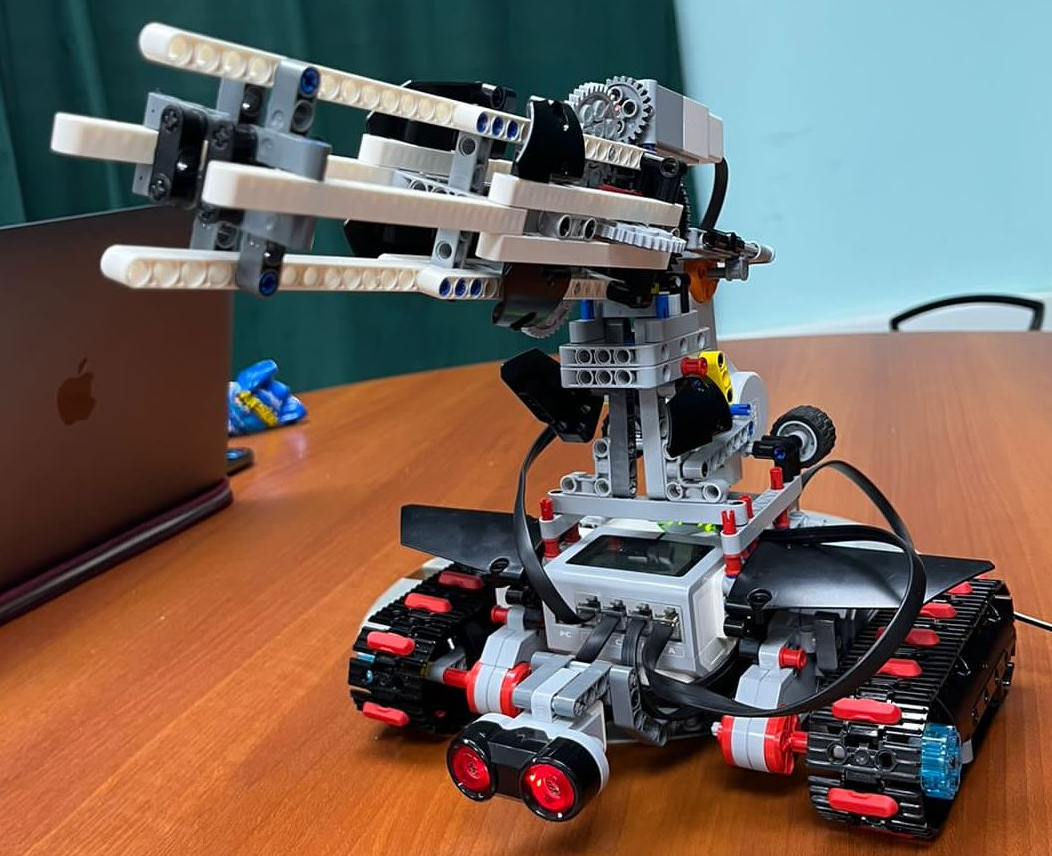
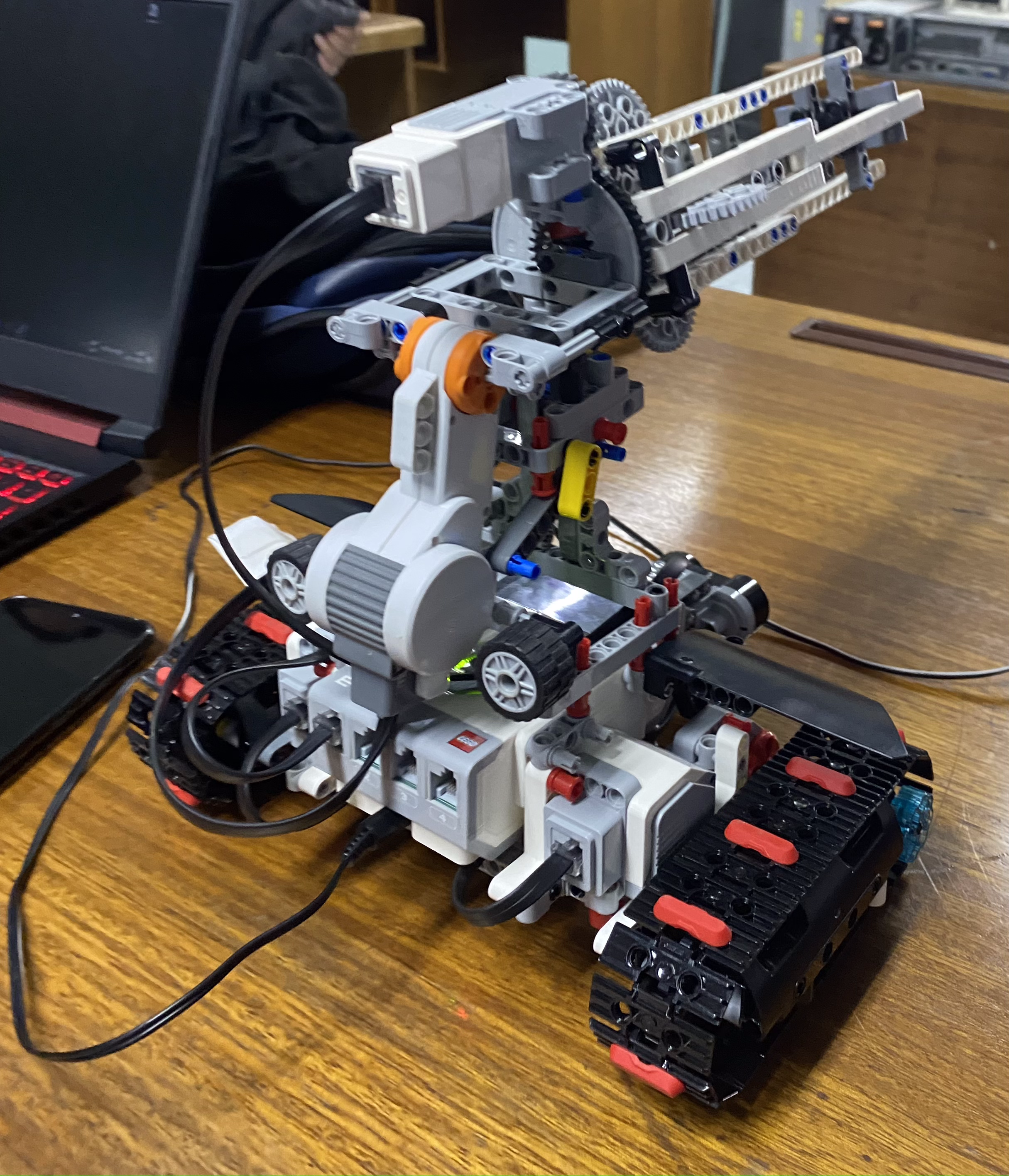
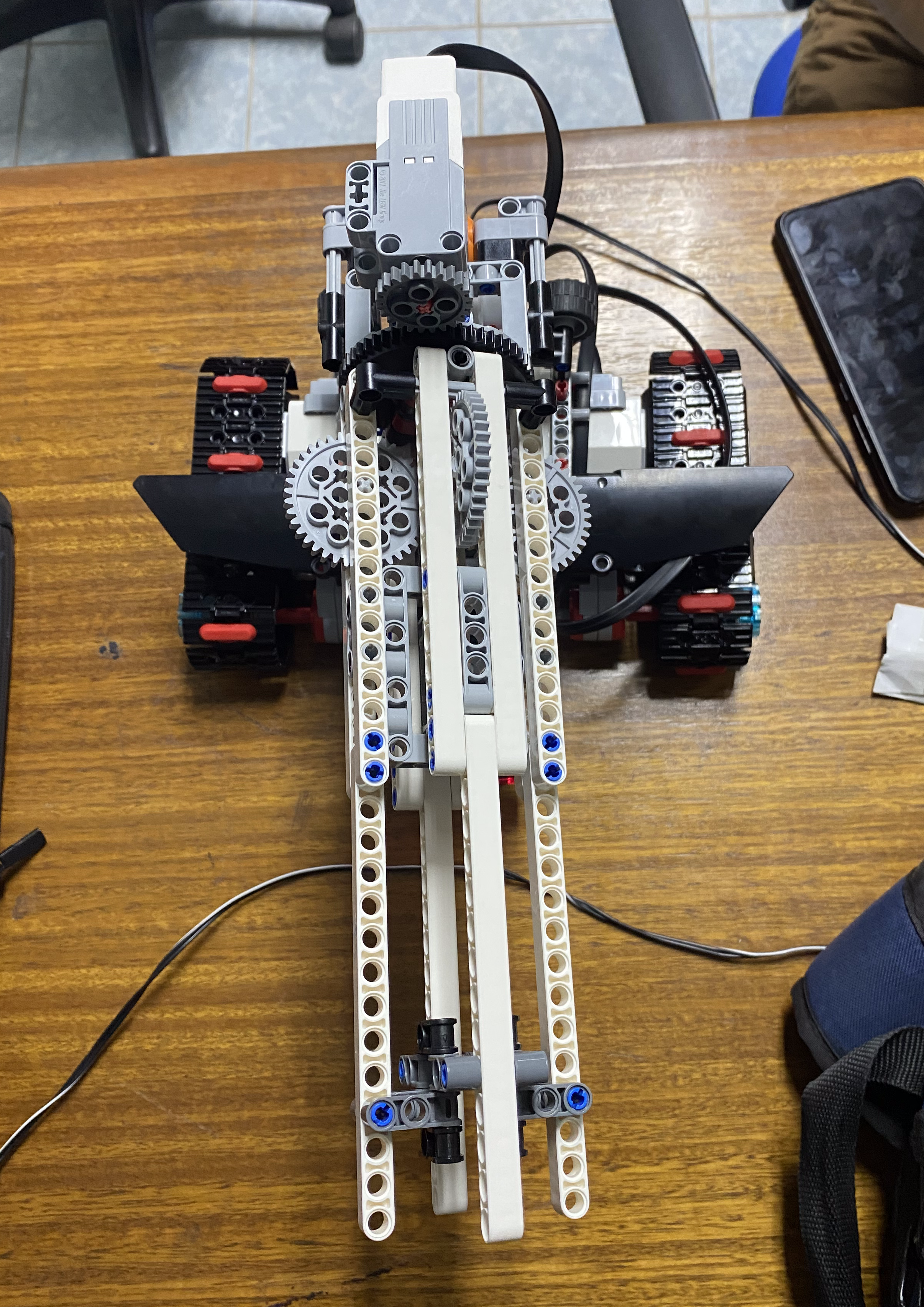
!!h1. PROYECTO: Gorilla-Tank MK ll
INTEGRANTES
- García Arancibia Brayan Ignacio
- Huanca Calle Luis Francisco
- Pailamilla Peréz Gabriel Antonio
- Santiago Yovich Vranika Fernanda
- Vera Norambuena Luciano Raúl
| Roles | Descripción | Involucrados | Responsables |
|---|---|---|---|
| Jefe de Grupo | Encargado de representar al equipo de trabajo, de la organización y de la toma de decisiones. | Vranika Santiago | Vranika Santiago |
| Programador(es) | Encargados de desarrollar e implementar el código en Python logrando así que el robot pueda ejecutar las acciones solicitadas. | Luis Huanca y Brayan García | Luis Huanca |
| Documentador(es) | Encargados de realizar los informes, presentaciones, bitácoras, video, manual de usuario y wiki del proyecto. | Luis Huanca, Brayan García, Gabriel Pailamilla, Luciano Vera y Vranika Santiago | Vranika Santiago |
| Diseñador(es) | Encargado de la estética de la interfaz gráfica. | Brayan García y Luciano Vera | Brayan García |
| Ensamblador(es) | Encargado de diseñar y armar el robot de tal manera que pueda moverse en todas las direcciones y lance un proyectil. | Gabriel Pailamilla y Luciano Vera | Gabriel Pailamilla |
OBJETIVO GENERAL¶
- El objetivo general de la actividad es desarrollar y construir un robot EV3 que tiene la funcionalidad de disparar proyectiles a travé de una interfaz gráfica programada en Python.
OBJETIVOS ESPECÍFICOS¶
- Estudiar la librería Tkinter que ofrece Python para hacer interfaces gráficas de usuarios.
- Crear una interfaz gráfica de usuario que esté capacitada para enviar instrucciones remotamente hacia el robot EV3.
- Aplicar los contenidos vistos el semestre pasado en la asignatura Mecánica clásica acerca del movimiento de proyectiles y luego hacer predicciones en base a las fórmulas dadas.
| RESTRICCIÓN | DESCRIPCIÓN |
|---|---|
| Tiempo | Fecha límite para hacer proyecto. |
| Set Lego EV3 | Utilización sólo del kit LEGO MINDSTORM EV3 |
| Temática | Debe tener un cañón que dispare |
| Control | El robot tiene que ser controlado a distancia |
| Plataforma de documentación | Todos los archivos redactados serán subidos a Redmine |
{kind=link}
{kind=link}
{kind=link}
{kind=link}