Introducción » History » Version 127
« Previous -
Version 127/152
(diff) -
Next » -
Current version
Vranika Santiago, 11/24/2022 10:54 PM
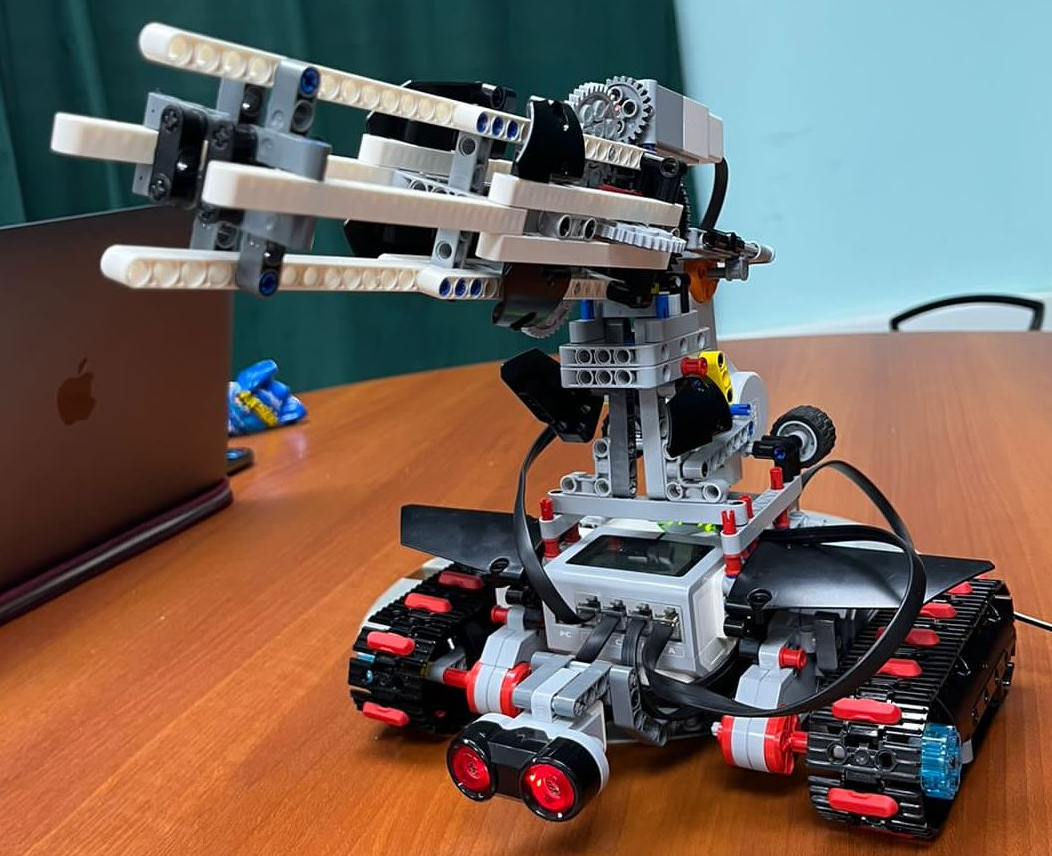
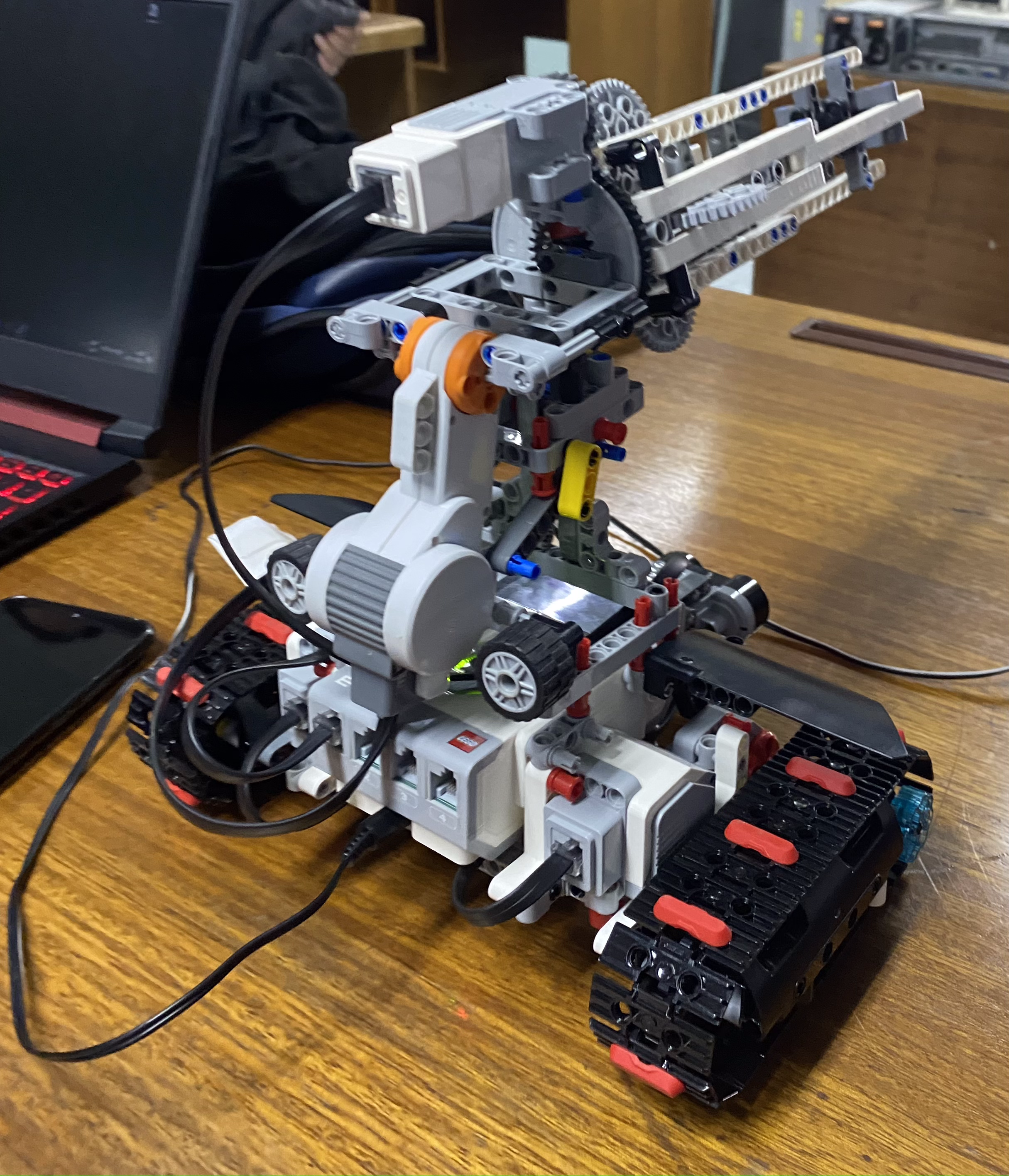
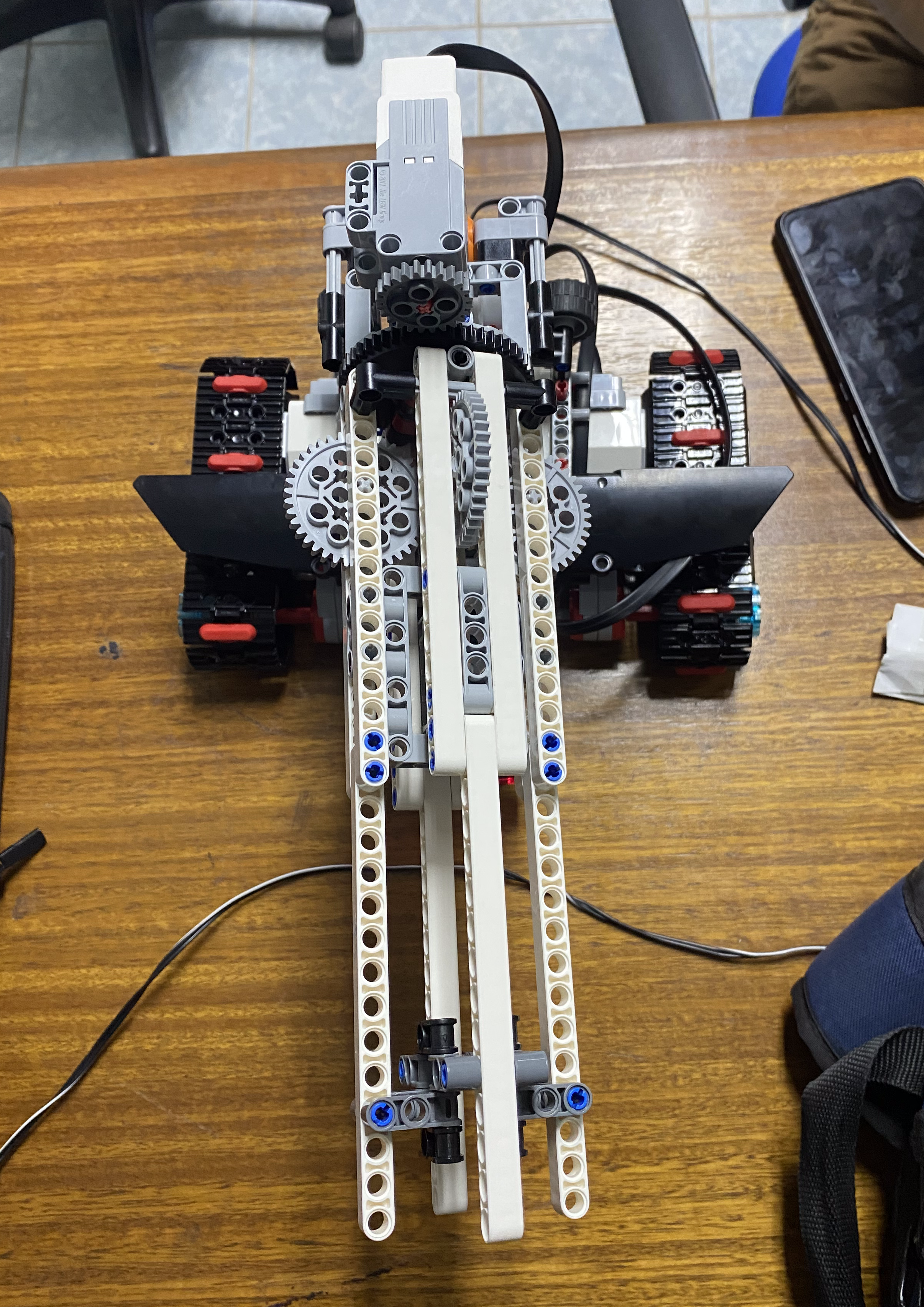
PROYECTO l: Gorilla Tank MK-ll¶
- LOGO DEL PROYECTO -
Panorama General¶
El proyecto “Gorilla-Tank MK ll” creado para la asignatura Proyectos l, fue armado con piezas del kit LEGO® MINDSTORMS® Education EV3. Por consiguiente, en esta plataforma se expondrá el proyecto tecnológico trabajado en clases.
Cabe señalar que, para este trabajo, se usarán tanto los conocimientos que se han adquirido en la formación de los estudiantes de la carrera, como también aplicando la materia de Taller de Programación l y ll.
El grupo de trabajo está conformado por 5 integrantes:- Brayan Ignacio García Arancibia
- Luis Francisco Huanca Calle
- Gabriel Antonio Pailamilla Peréz
- Vranika Fernanda Santiago Yovich
- Luciano Raúl Vera Norambuena
Y nuestro objetivo general es desarrollar y construir un robot EV3 que tiene la funcionalidad de disparar proyectiles a través de una interfaz gráfica programada en Python.
- ROBOT EN LA ACTUALIDAD -
| RESTRICCIÓN | DESCRIPCIÓN |
|---|---|
| Tiempo | Fecha límite para hacer proyecto. |
| Set Lego EV3 | Utilización sólo del kit LEGO MINDSTORM EV3 |
| Temática | Debe tener un cañón que dispare |
| Control | El robot tiene que ser controlado a distancia |
| Plataforma de documentación | Todos los archivos redactados serán subidos a Redmine |
GESTIÓN DE RIESGOS¶
Niveles de impacto:
1. CATASTRÓFICO
2. CRÍTICO
3. CIRCUNSTANCIAL
4. IRRELEVANTE
| RIESGOS | PROBABILIDAD DE CONCURRENCIA | NIVEL DE IMPACTO | ACCION REMEDIAL |
|---|---|---|---|
| Desarme del robot a causa de una caida. | 40% | 2 | Volver a construir el robot. |
| Daño o perdida de la tarjeta SD. | 10% | 1 | Comprar otra tarjeta SD y respaldar la informacion |
| Escasez de piezas. | 80% | 3 | Ir a buscar las piezas faltantes o reemplazarla por una similar. |
| Enfermedad o inconveniente del personal | 40% | 3 | Un integrante del grupo se encargara temporalmente de las tareas del personal faltante |
| Reconstrucción total del robot por incompatibilidad de lo requerido en el proyecto. | 25% | 1 | Buscar nuevas ideas acorde a lo pedido y llevarlas a cabo. |
| Incumplimiento de tareas. | 20% | 2 | Reorganizar los roles del grupo para asignar el mas opimo y establecer fechas limites de trabajo. |
| Pocas horas Autonomas | 10% | 2 | Mejorar la comunicacion y motivar a los integrantes del grupo buscando horarios disponible para todos. |
| Descarga de bateria del EV3. | 35% | 4 | Cargar la bateria, mientras el EV3 no sea utilizado. |
ARQUITECTURA¶

1. El robot y el notebook deben estar conectados a la misma red Wifi.
2. Iniciar el archivo Server.py para así obtener la conexión remota con el notebook.
3. El usuario debe iniciar la interfaz gráfica para controlar el robot a distancia.
4. La interfaz se conectará al servidor del robot y el usuario podrá controlarlo.
5. Robot que realizará los movimientos enviados por el usuario gracias al servidor establecido entre sí mismo y el notebook del usuario.
INTERFAZ¶

- Flechas para indicar las direcciones en las que el robot se desplazará, es decir, ir para adelante, para atrás, girar a la izquierda y girar a la derecha.
- Botón “Ingresar” que tiene como función ingresar el ángulo del cañón, en el cual en la parte de arriba se puede encontrar el símbolo de un ángulo.
- Botón “Disparar” que logra disparar el proyectil.
- Botón “Conectar” el cual vincula al cliente a través de la IP del servidor que está en el EV3.
- Logo característico del robot construido junto a su nombre.
- Botón con el símbolo de on – off que permite salir del programa, en cualquier momento.
{kind=link}
{kind=link}
{kind=link}
{kind=link}