Proyecto 1 : Robot
Integrantes: Joe Jonathan Arellano Rosero
ㅤㅤㅤㅤㅤㅤㅤAlan Abraham Rivera Catari
ㅤㅤㅤㅤㅤㅤㅤFernanda Javiera Ventura Briceño
ㅤㅤㅤㅤㅤㅤㅤBryan Javiera Vidaurre Medina
Panorama General
Introducción
El proyecto será realizar un robot apoyándose con Lego Mindstorms que es una línea robótica de LEGO que posee elementos básicos de la robótica, como la unión de piezas y la programación de acciones en forma interactiva.
El robot debe cumplir con múltiples acciones siendo controlado a través de una interfaz, usaremos nuestros conocimientos del lenguaje Python en el desarrollo del programa.
Objetivo General:
Construir un robot con el set Lego Mindstorms EV3, capaz de movilizarse y disparar legos a través de una interfaz que controle todas y cada una de las acciones e instrucciones del robot. La codificación de los programas será desarrollada con el lenguaje Python, en las cuales estén las funciones del robot, la interfaz y el servidor.
Objetivos Específicos:
- Integrar los conocimientos del lenguaje Python en el desarrollo del software del robot.
- Aprender a profundidad el uso de su extensión ev3 MicroPython en Visual Studio Code.
- Realizar un software de calidad que desempeñe todas las acciones del robot.
- Diseñar una interfaz simple y comprensible para el control del robot.
- Lograr que los legos del robot estén compactos.
- Calcular el lanzamiento de los legos del robot.
- Trabajar en equipo para el desarrollo del proyecto, resolviendo problemas, planificando la acción, asignando responsabilidades, resolviendo conflictos y comunicando la solución.
Organización del personal
Descripción de roles
- Jefe de proyecto: Gestiona de manera global el proyecto difundiendo los resultados en la plataforma de gestión de proyecto Redmine. Planifica, define los recursos, coordina y supervisa el avance, escribiendolas en bitácoras semanales así como también el desarrollo y la implementación del software.
- Programador: Se encarga de escribir, de depurar y de revisar todo el código fuente de un software informático para que lleve a cabo determinadas tareas, o incluso para que sea más eficiente, incorporando nuevas funciones para hacer que sea una herramienta más completa y eficaz para el robot.
- Organizador: Controla el transcurso del proyecto, soluciona posibles imprevistos que surjan, coordinará las distintas actividades semanales para cada miembro del equipo. Además de redactar y desarrollar gran parte de los informes y presentaciones. Fernanda
- Arquitecto: Se encarga de proyectar, diseñar y dirigir la construcción o el mantenimiento de los legos.
Personal
Jonathan Arellano: Arquitecto y apoya al programador.
Alan Rivera: jefe de proyecto y apoya al organizador.
Fernanda Ventura: Organizadora y apoya al programador.
Bryan Vidaurre: Programador.
Planificación del proyecto
Actividades
Para que el proyecto tenga éxito, antes que todo es necesario planificar con cuidado las actividades ya que serán las acciones que intervendrán sobre la realidad necesaria para alcanzar los objetivos específicos.
En esta etapa definiremos el alcance de la planificación de todas las actividades necesarias para llevar a cabo el proyecto, considerando las prioridades del proyecto, los recursos necesarios, los tiempos esperados para ejecutar cada una de las tareas y sus funcionalidades.
- Bitácoras: Realizar bitácoras semanales donde indicaremos el avance del proyecto. Responsable: Alan Rivera.
- Carta Gantt: La herramienta básica que utilizaremos para realizar la planificación del proyecto.. Responsable: Fernanda Ventura.
- Armado del Robot: Los legos deben estar compactos y equilibrado de peso. Responsables: Jonathan Arellano y Alan Rivera.
- Sistema Operativo en la microSD: Instalar el sistema operativo windows en la tarjeta de SD, para poder ingresarla al computador del Robot, y así manejarlo. Responsable: Bryan Vidaurre.
- Conexión Remota: Conecta y verifica que los programas están trabajando de manera sincronizada con el robot. Responsables: Bryan Vidaurre y Jonathan Arellano.
- Programación: Codificar el código fuente del robot para poder realizar sus movimientos respectivos. Responsable: Bryan Vidaurre.
- Aplicación Robot: Aplicación creada a través de python, la cual tendrá una interfaz para poder señalizar las acciones a realizar al robot. Responsable: Bryan Vidaurre.
- Exhibición: Presentamos el resultado final del proyecto. Responsables: Alan Rivera y Fernanda Ventura.
Planificación de los recursos
Recursos de hardware, software requeridos
- Hardware
Lego Mindstorms EV3
Notebook
Control xbox
MicroSD
- Software
Ev3dev (ev3dev.org)
Python
PuTTY (putty.org)
Visual Studio Code (extensión: ev3dev-browser )
Whatsapp
Correo electrónico
Canva
| problemas encontrados | solución propuesta |
| Conexión del brick con el computador: A la hora de usar la extensión del EV3 en el visual studio code era muy inestable lo que no permitía hacer un trabajo fluido y seguro, luego intentamos con putty conectándonos por bluetooth pero aun así este camino podría seguir dificultándose la mejor propuesta era hacer la conexión teniendo la misma red wifi en el brick y en el computador a desarrollar la aplicación. | la mejor propuesta era hacer la conexión teniendo la misma red wifi en el brick y en el computador a desarrollar la aplicación. |
| Arquitectura del robot: Al ejecutar el código de los movimientos básicos del robot nos retenía el giro de las ruedas ya que ocasionaban que las ruedas se salieron de su sitio lo cual hacía un desequilibrio total en el robot, quedando sin su movilidad. | Para solucionar el tema de las ruedas, la mejor opción era volver a construir una base más segura sobre todo que las ruedas estén firmes a la base. |
Estado final del proyecto: 100%
Video:
[[https://streamable.com/kfswkt]]
Link de descarga interfaz:
[[https://github.com/BryanVidaurre/UkranianBot/tree/master]]
Fotos de avance
Asignación de Kit
Jefe encargado de las bitacoras
Preparando el boceto del robot
Constructor del robot
Preparación del primer informe y presentación
Programador
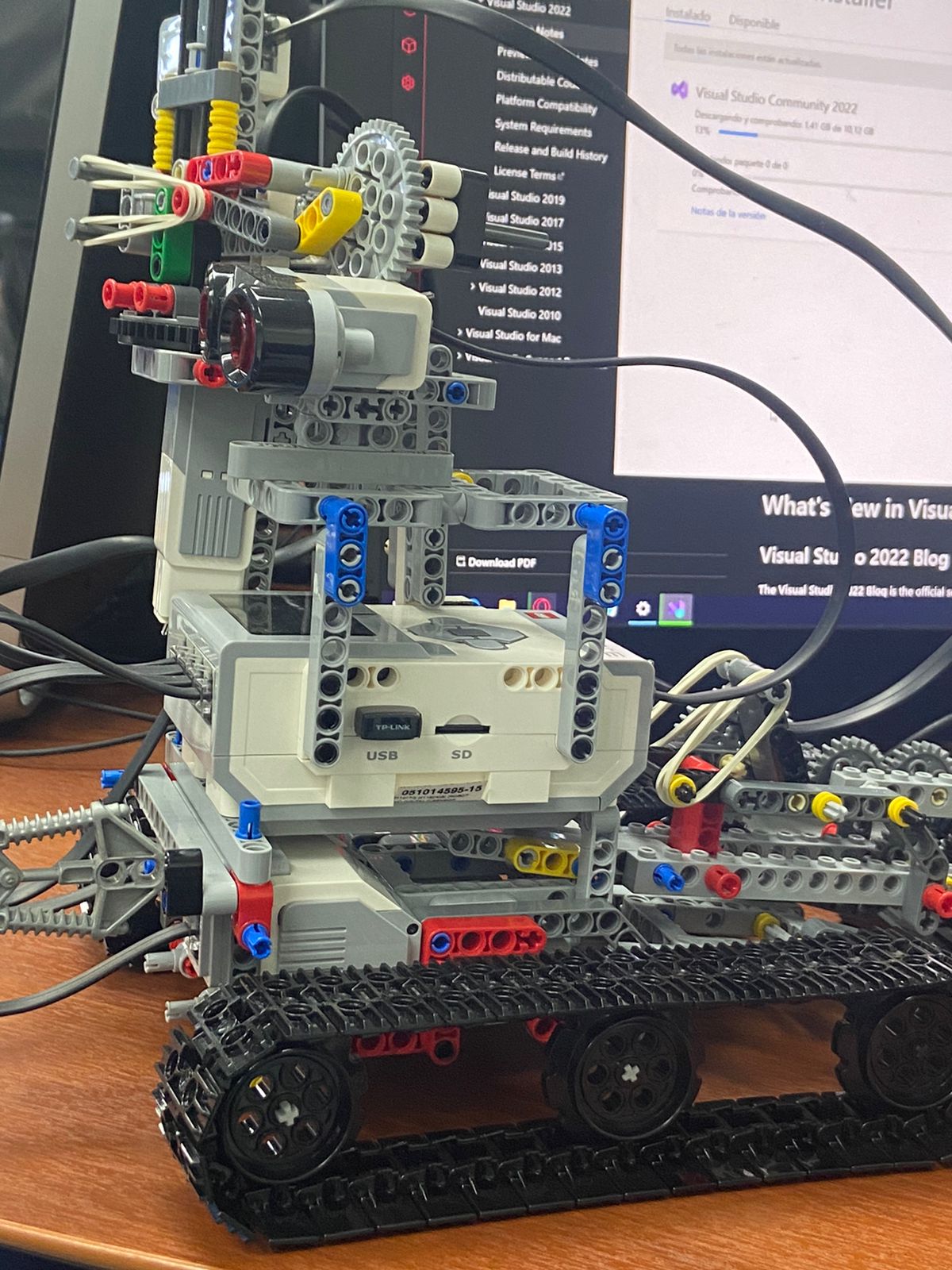
Version beta del robot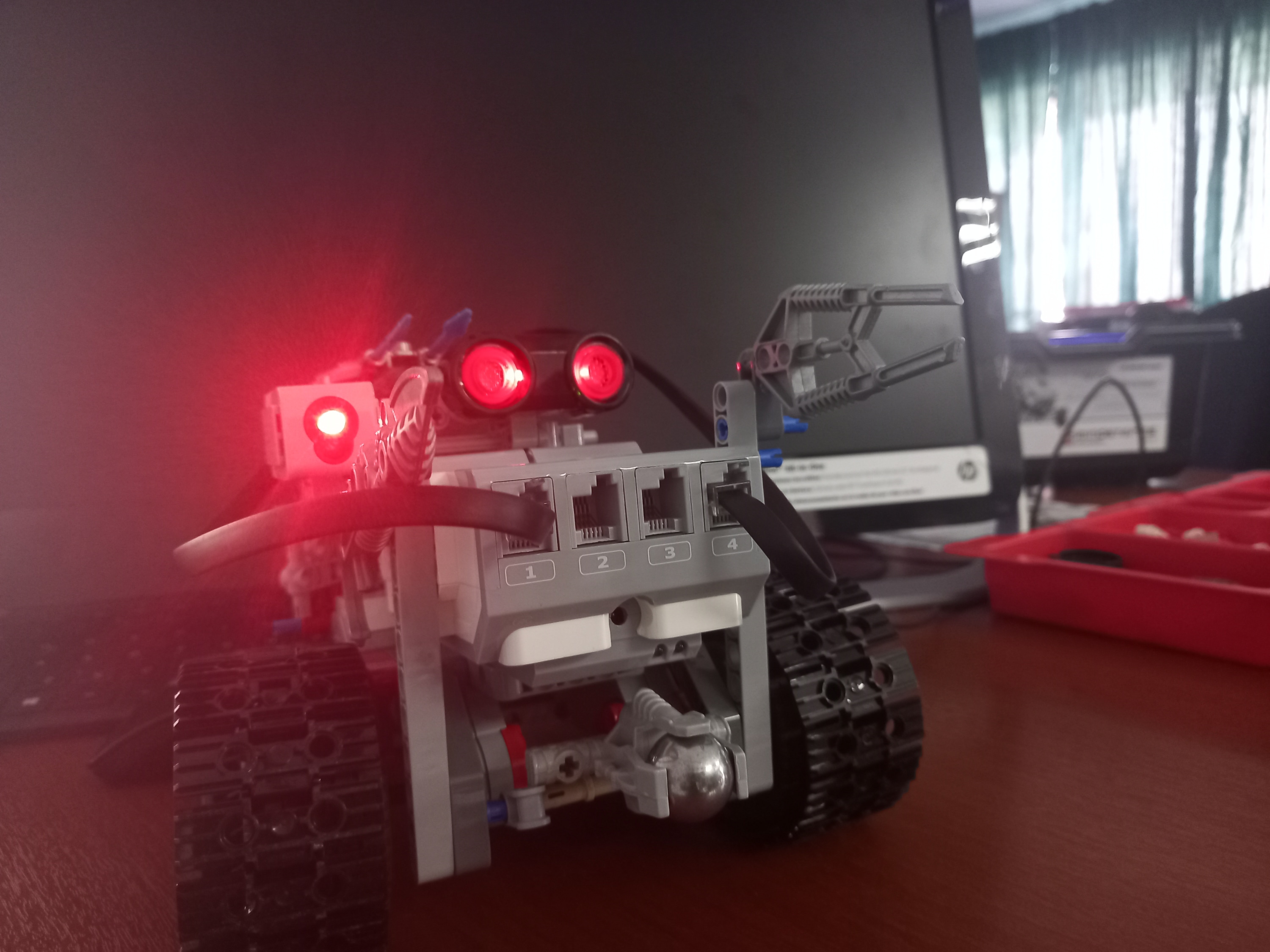
Prototipo 1.0 versión actual
Ayudando al Alan con la bitacora
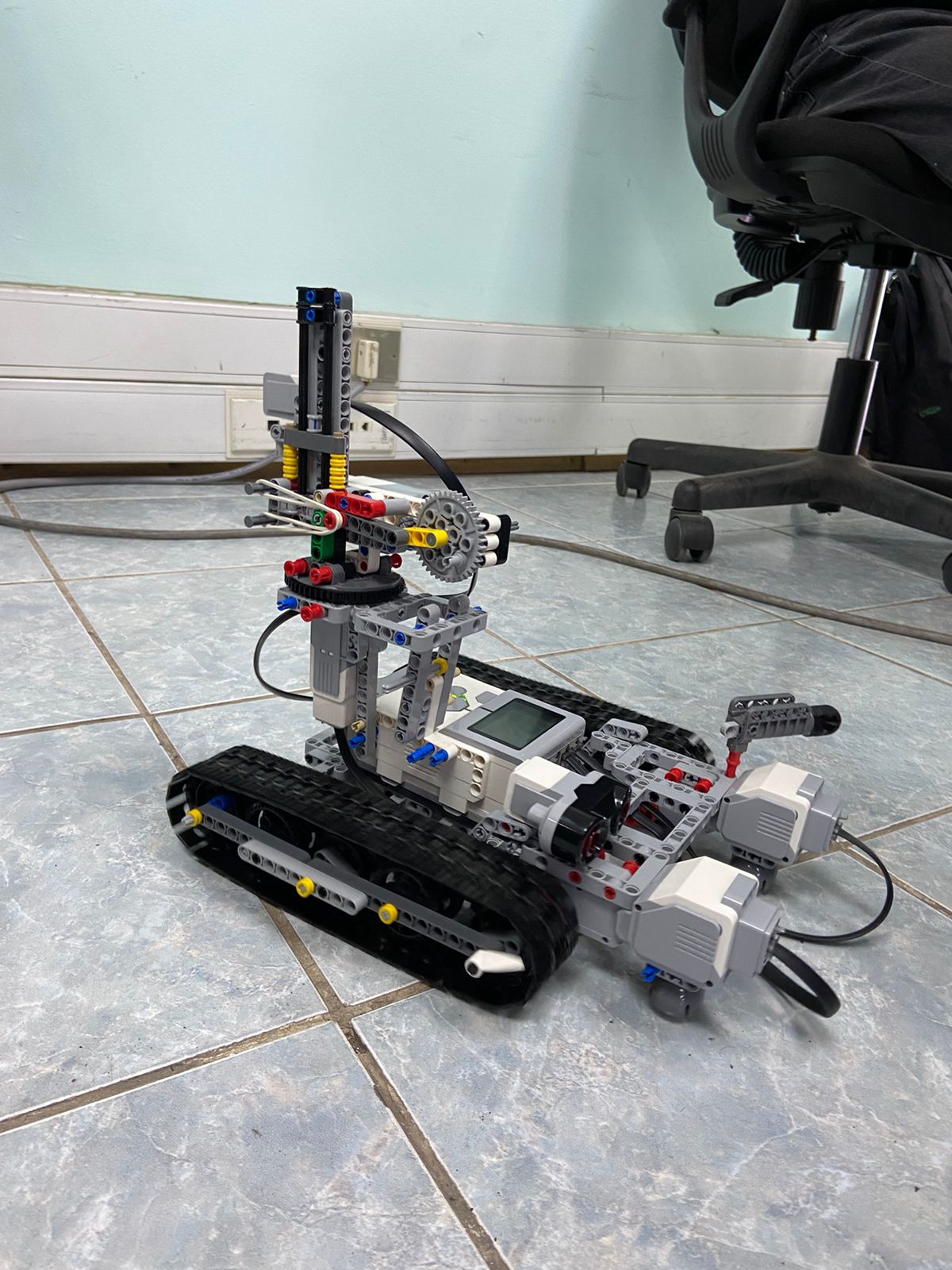
Robot prototipo 2.0
fecha:6/10/2022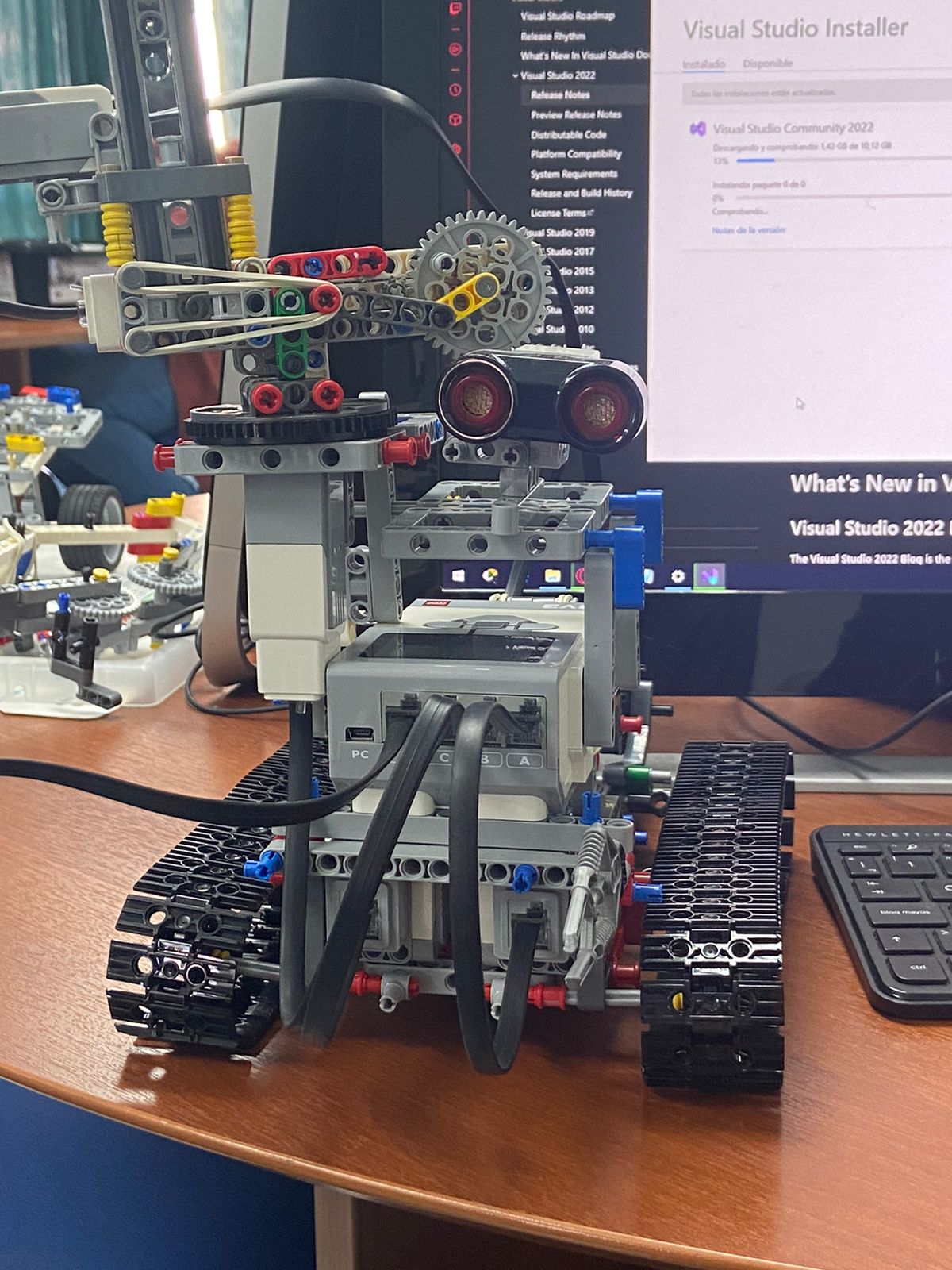

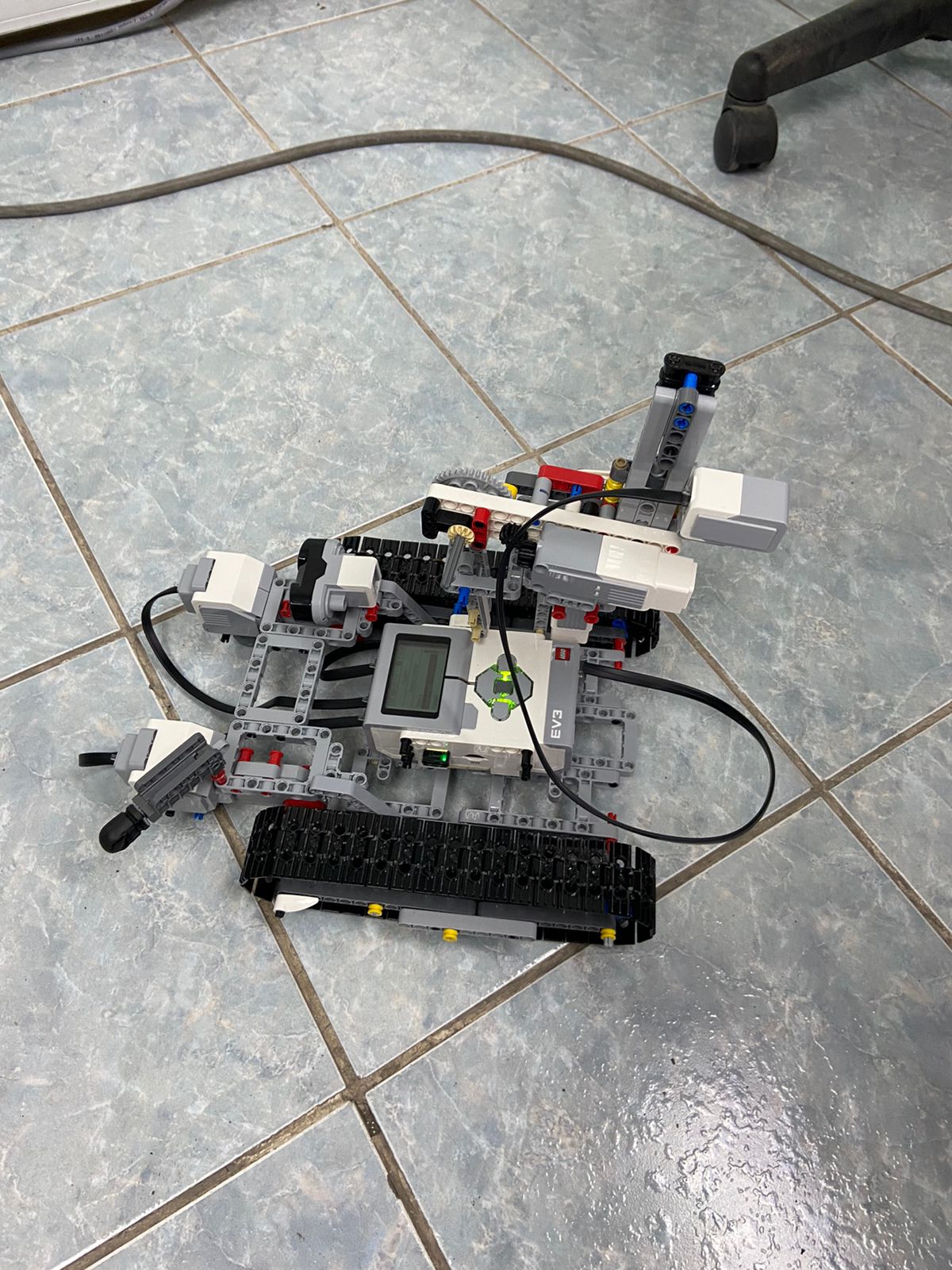
Robot 3.0
fecha: 25/10/2022
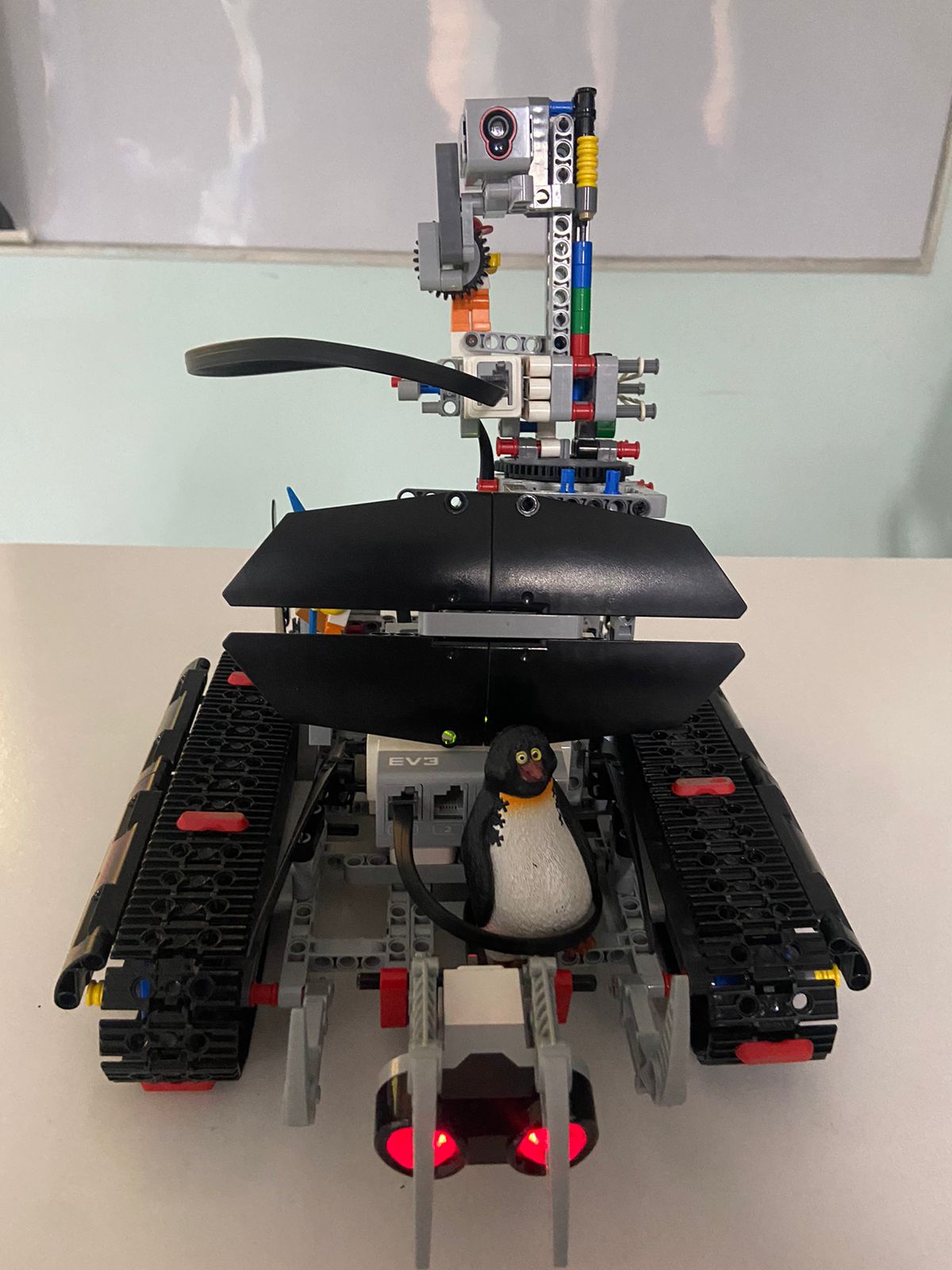
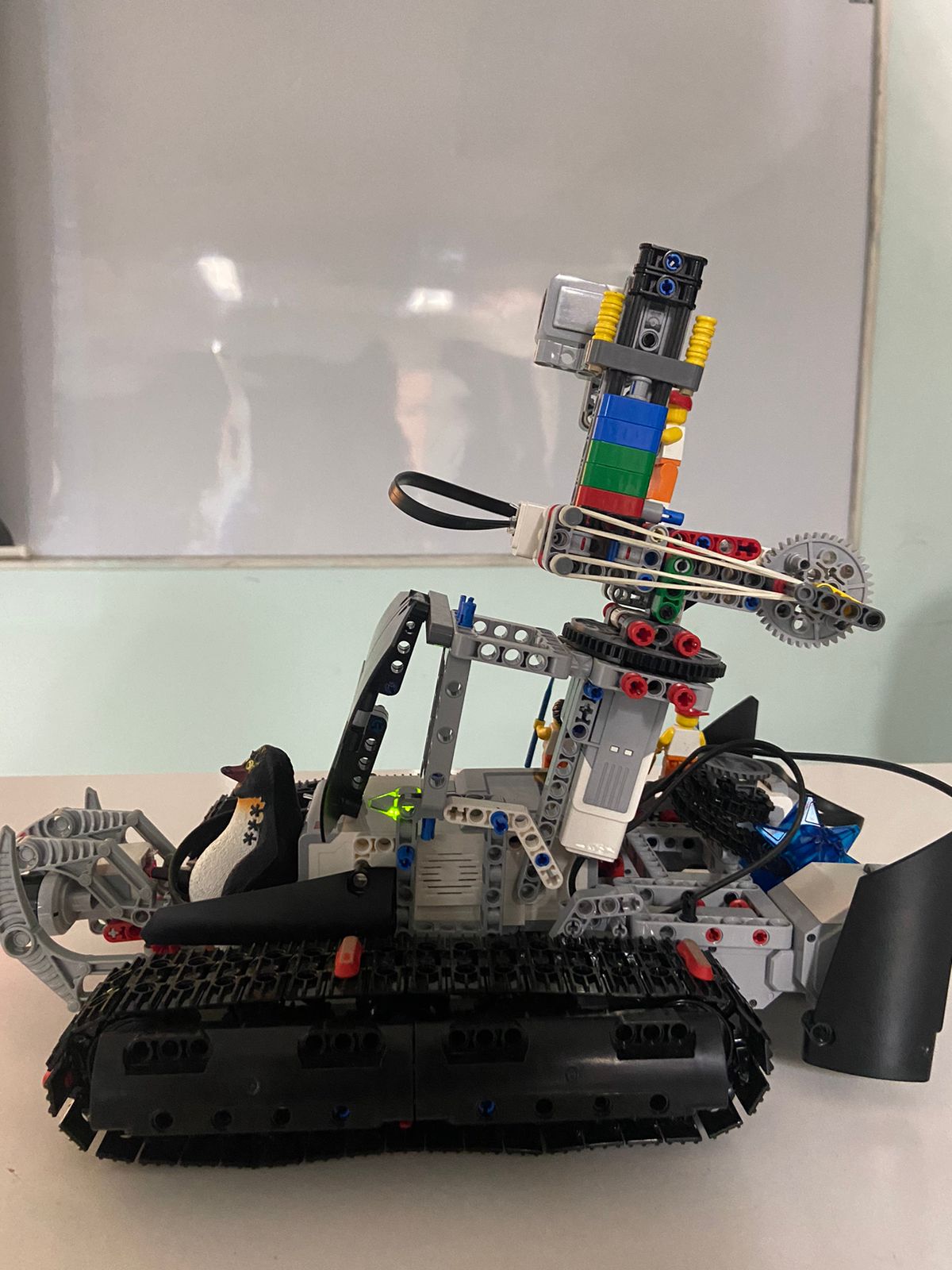
ROBOT FINAL 4.0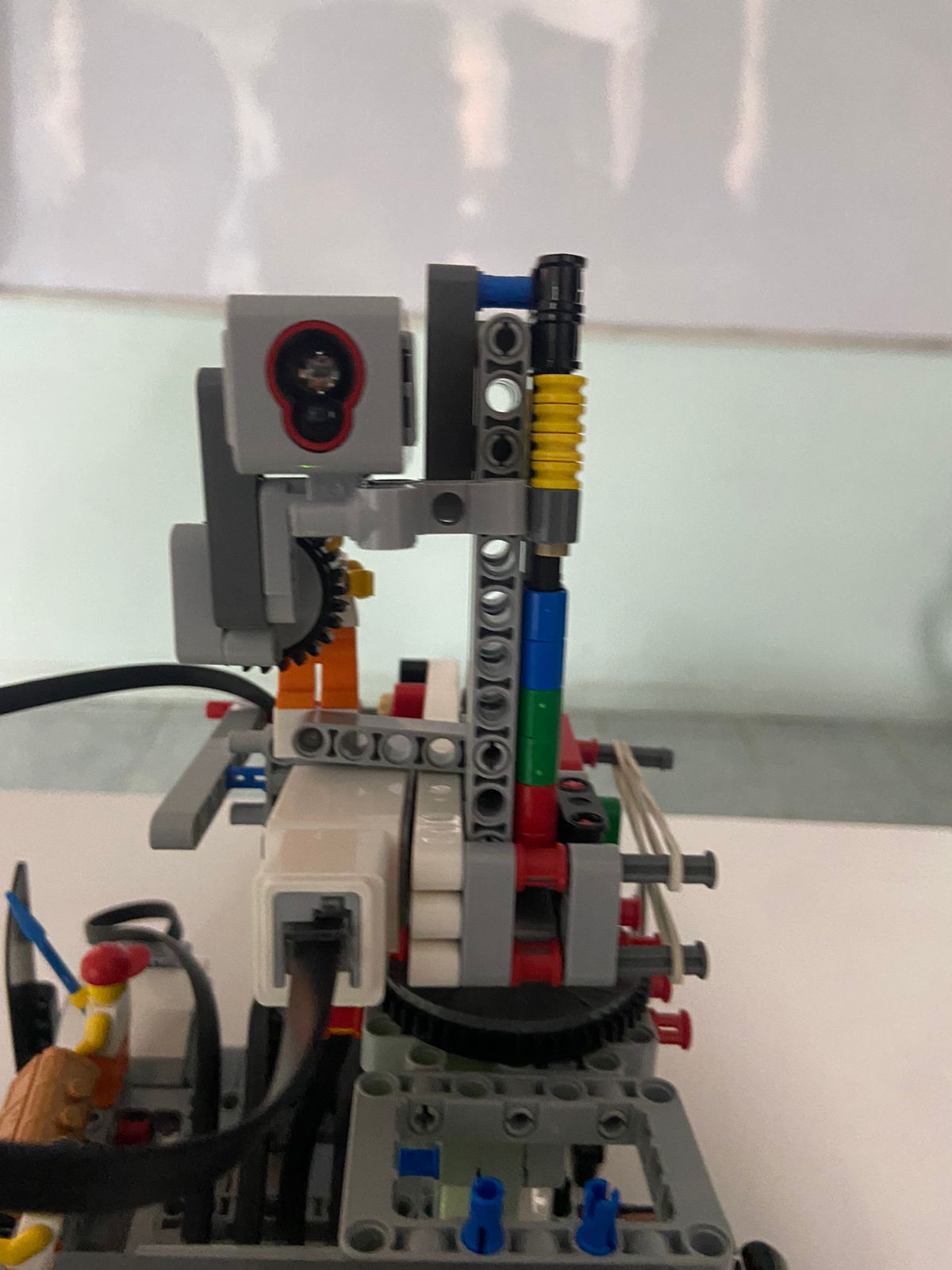


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
.jpeg){kind=link}
.jpeg){kind=link}
.jpeg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}