Análisis y Diseño » History » Version 51
« Previous -
Version 51/95
(diff) -
Next » -
Current version
Cesar Jimenez, 11/25/2023 01:53 PM
ㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤWikipedia¶

Grupo A:
Integrantes: Cristian Sánchez, Jean Pier Duran, Sergio Rabanal, Valentina Álvarez, César Jiménez
Nombre del Producto: Machine EV3 G
Modulo: Proyecto I
Docente: Humberto Urrutia
Fecha de Inicio: 2023-08-14
Fecha de Termino: 2023-11-30
ㅤㅤㅤㅤㅤㅤㅤÍndice:
- Introducción
- Descripción y Objetivos
- Organización y Planificación
- Análisis y Diseño
- Código e Implementación
- Bibliografía
ㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤAnálisis y Diseño¶
Especificación de Requerimientos funcionales y no funcionales¶
Requerimientos funcionales:¶
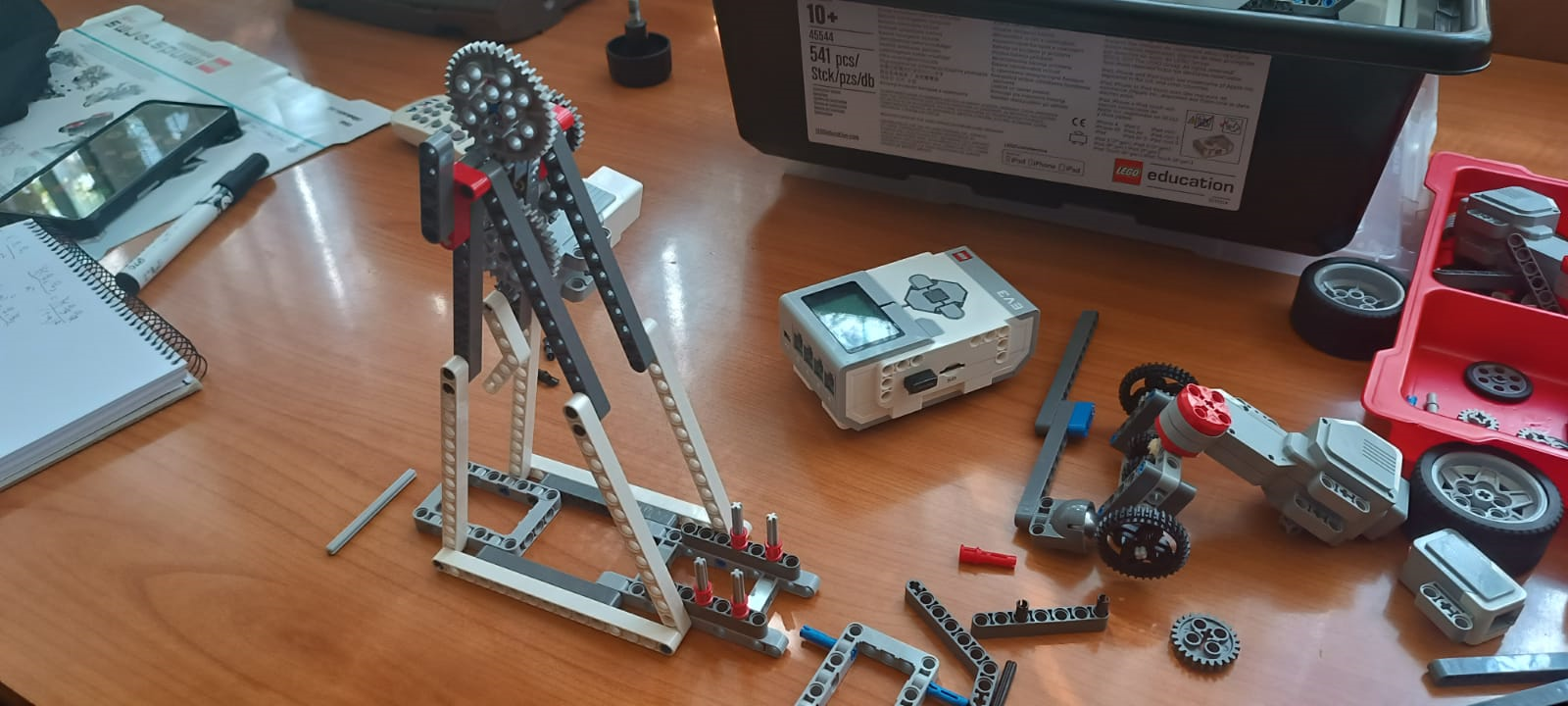
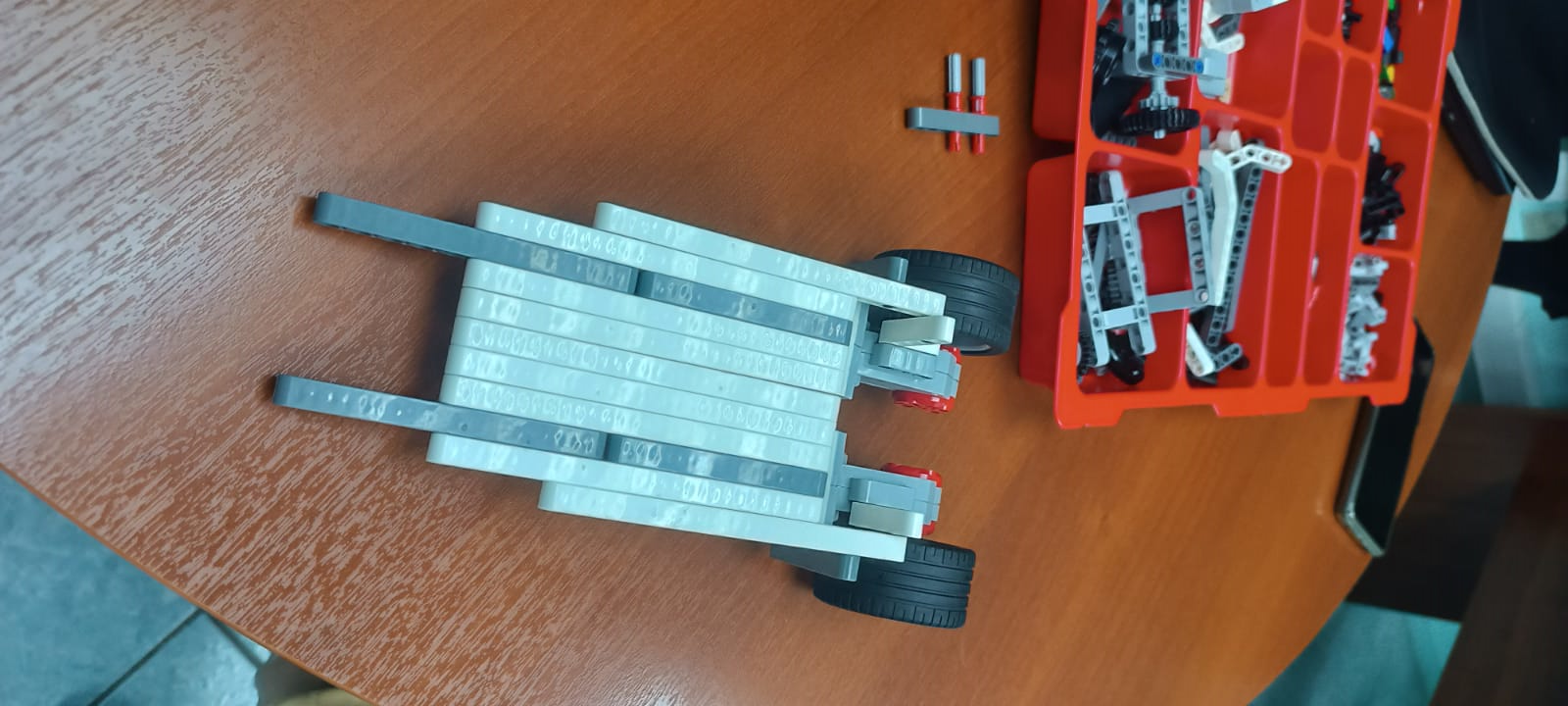
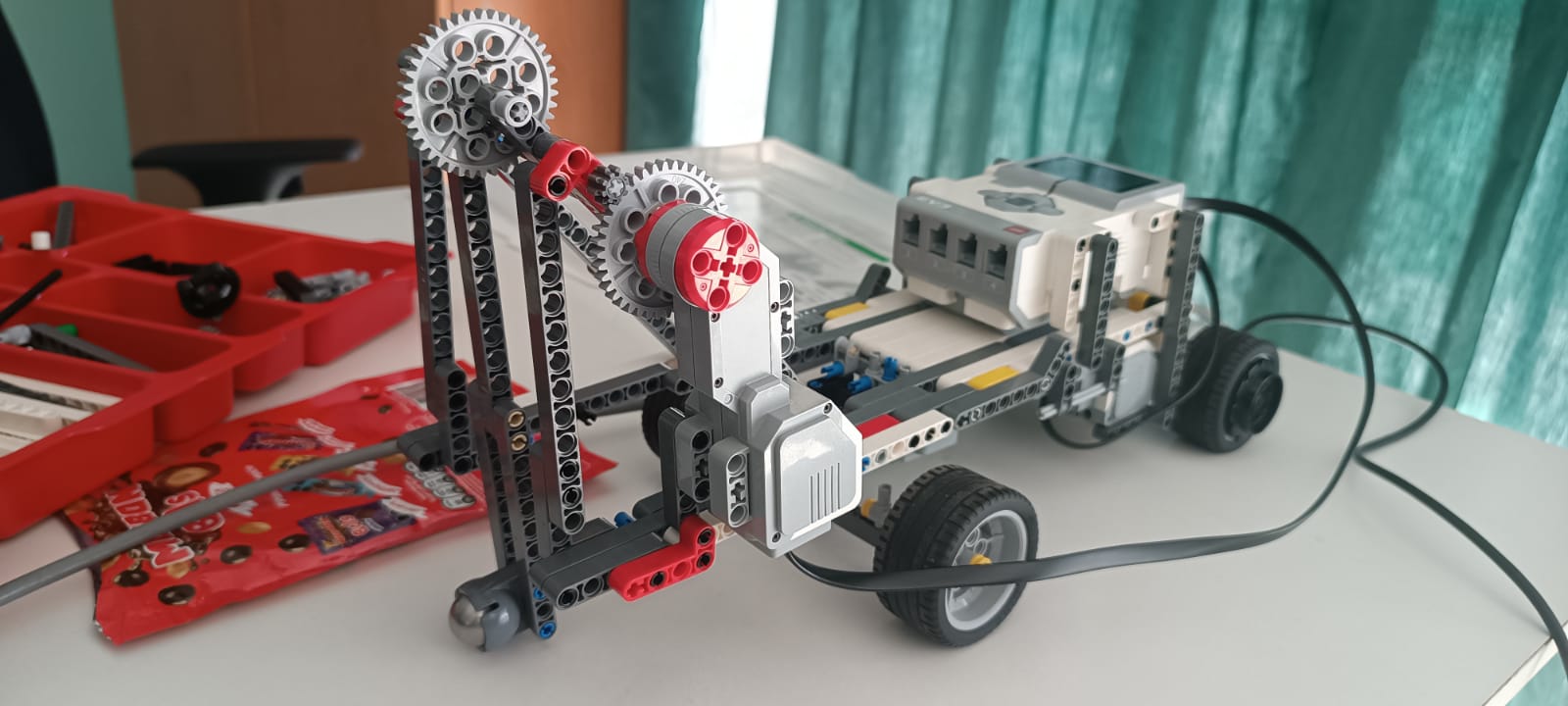
- El robot tiene que ser capaz de jugar al golf mediante un palo mecánico que lance la pelota.
- El robot debe poder ser capaz de moverse en distintas direcciones para ajustarse a la posición de la pelota.
- El robot ha de ser controlado por el usuario mediante una interfaz gráfica implementada por los programadores,
utilizando un computador capaz de ejecutar dicha interfaz.
Requerimientos no funcionales:
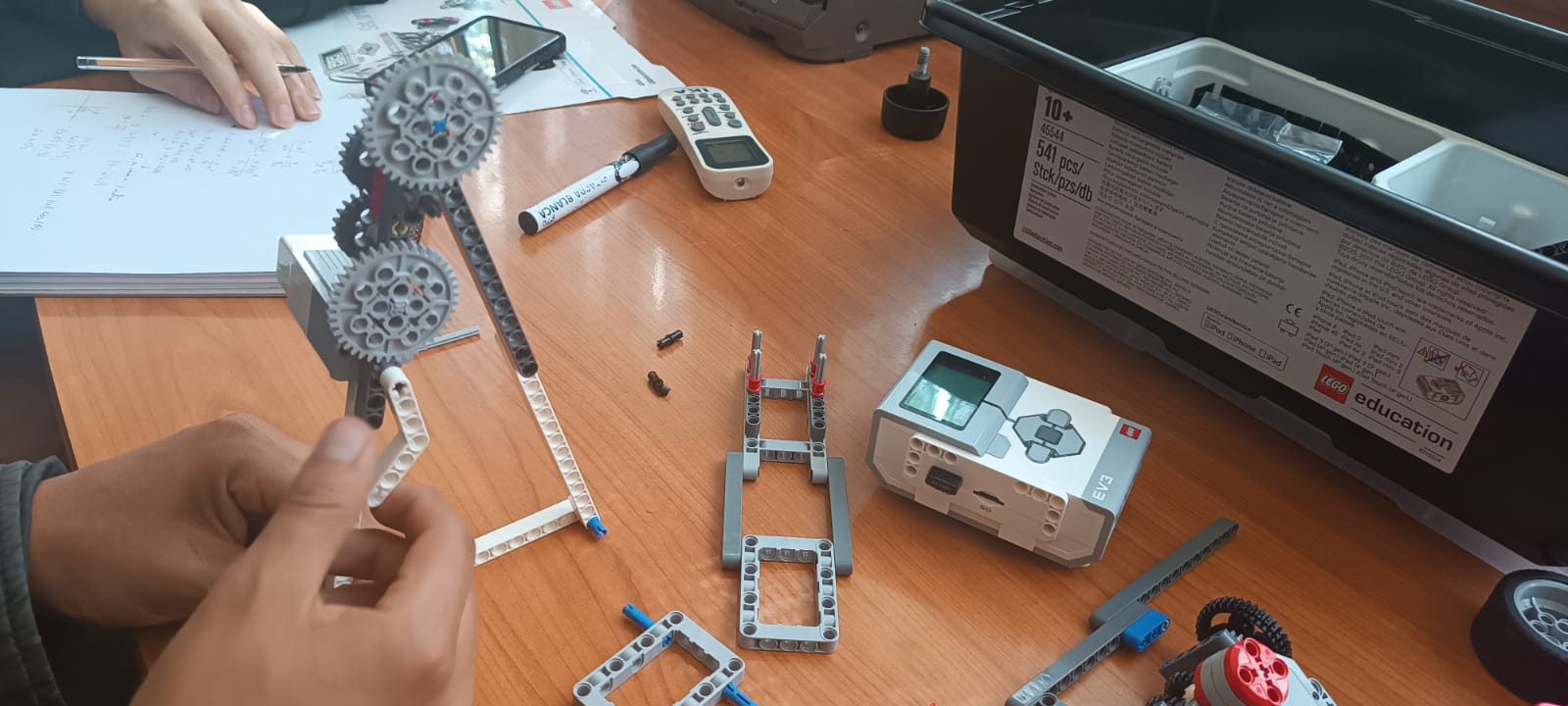
- La construcción del código junto con sus respectivos algoritmos serán hechos desde el lenguaje de programación Python.
- La interfaz gráfica ha de ser sencilla para el manejo del usuario, de modo que pueda realizar movimientos de forma fluida y poder ajustar el potencial de
disparo de la pelota.
- El entorno de desarrollo y diseño en el aspecto de la programación debe ser llevado en el sistema operativo linux, debido a las comodidades que este presenta
en el tema de sus librerías.
- El robot tiene que tener una ejecución fluida de sus movimientos o acciones.
disparo de la pelota.
en el tema de sus librerías.
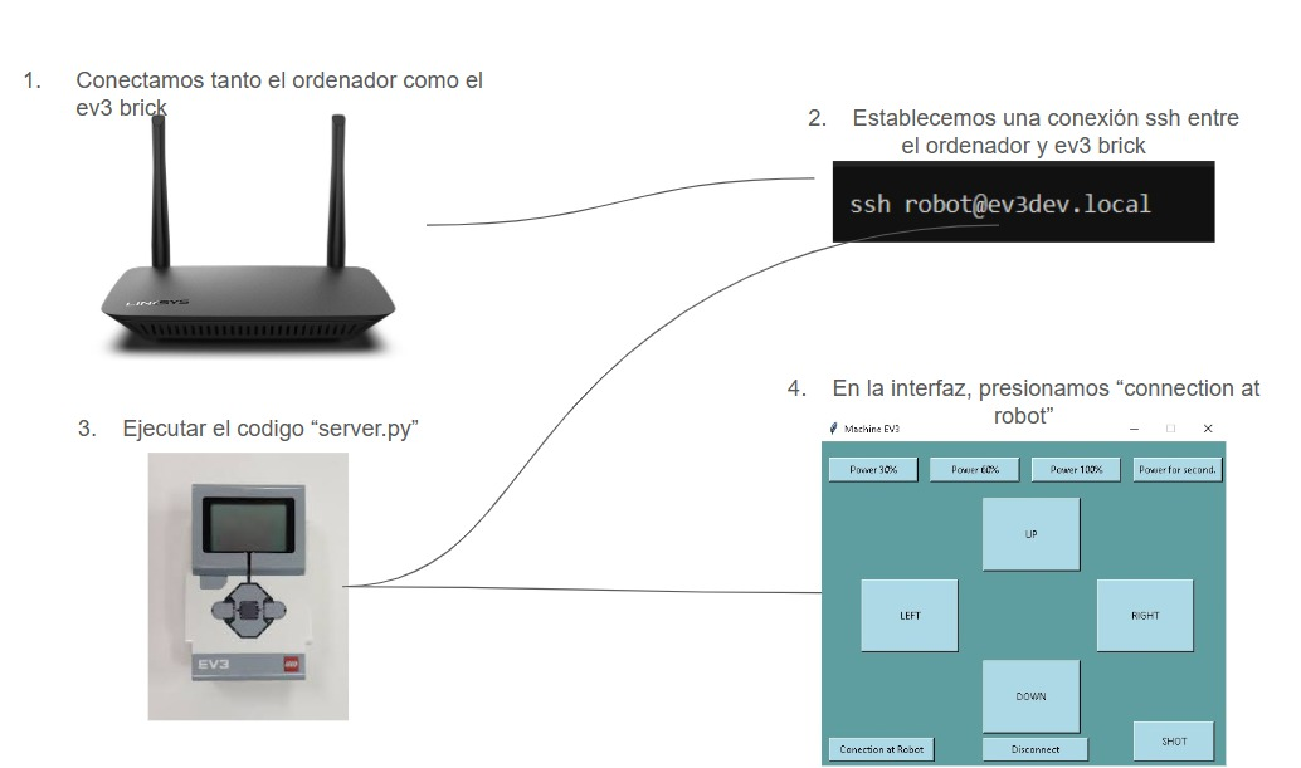
ㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤArquitectura¶
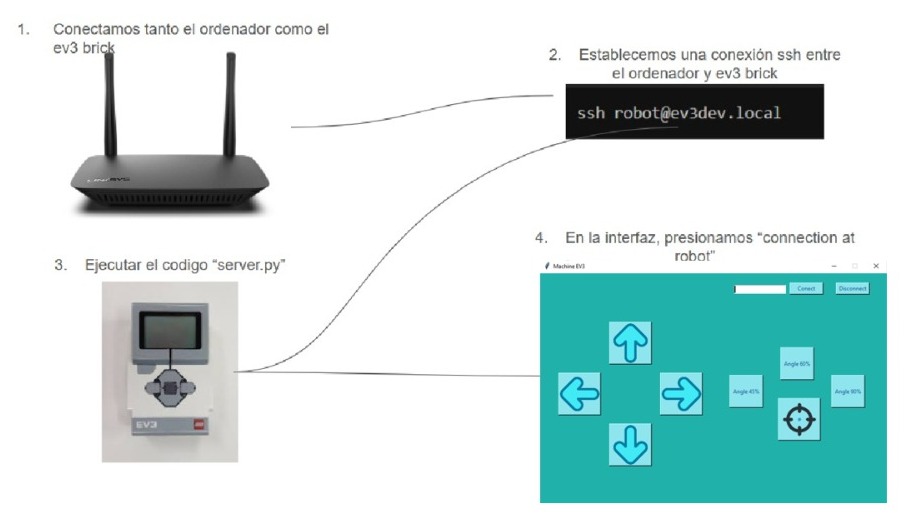
* El ladrillo EV3 y el notebook deben estar conectados a la misma red WIFI.
- La interfaz gráfica permite controlar al robot en todos sus apartados disponibles mediante una conexión remota.
- La conexión remota se lleva a cabo mediante la ejecución del programa Server.py, enlazando las funciones del programa con el robot.
- El robot ejecutará las acciones indicadas por el usuario que opera en el notebook mediante la interfaz gráfica.
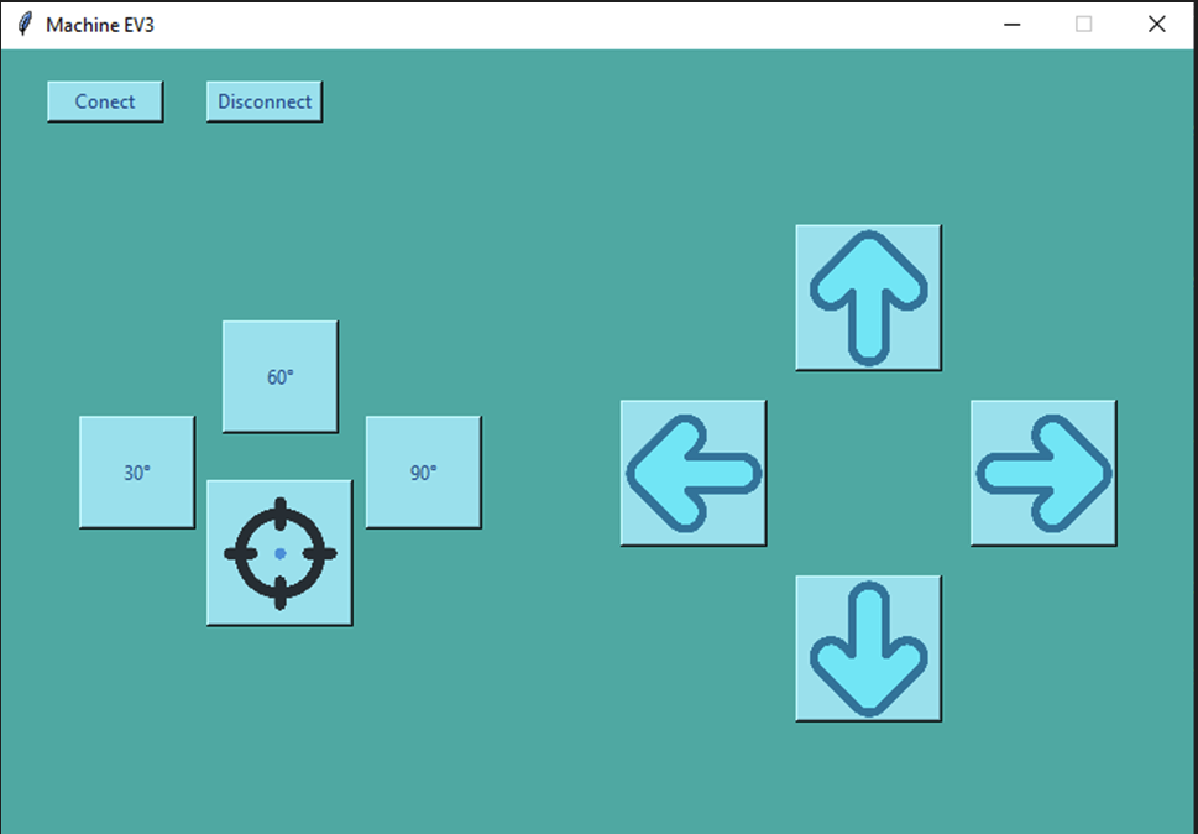
ㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤInterfaz Grafica¶
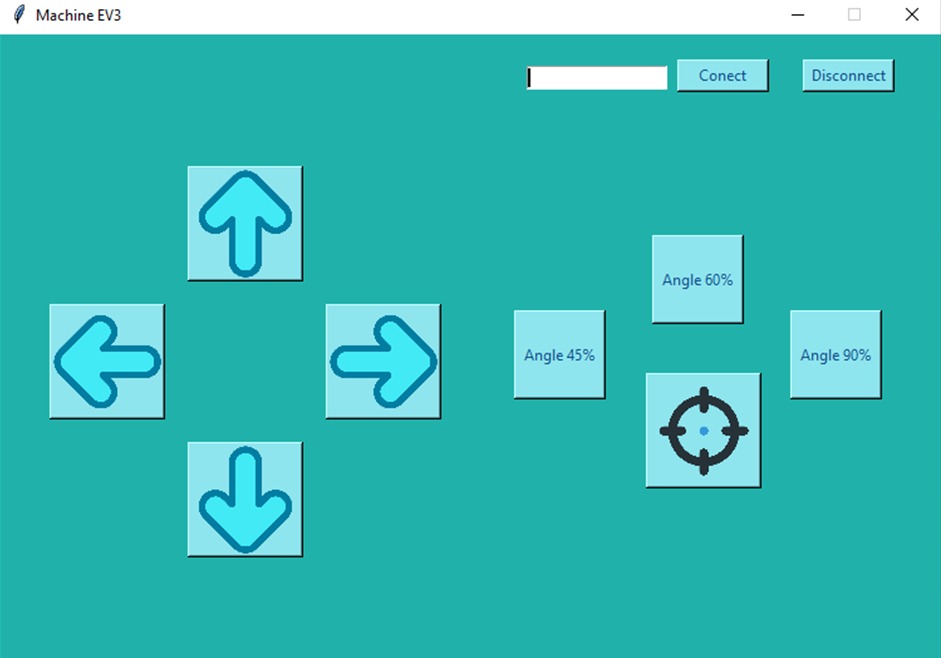
El usuario tendrá acceso a una pantalla principal con una interfaz, similar a la que se muestra en la imagen. En esta pantalla, encontrará las funciones y opciones principales.¶
- El botón "Connection at robot" se encarga de enlazar el cliente con el servidor a través de la dirección IP del EV3.
- El botón "Disconnect" se encarga de desenlazar la conexión remota.
- El botón "Shoot" mueve el brazo mecánico a una potencia del 50%.
- Flechas para controlar el movimiento del robot: hacia adelante, hacia atrás, giro a la izquierda y giro a la derecha.
- Los botones de potencias en la parte superior indican el % de fuerza a aplicar en el lanzamiento de la pelota de golf
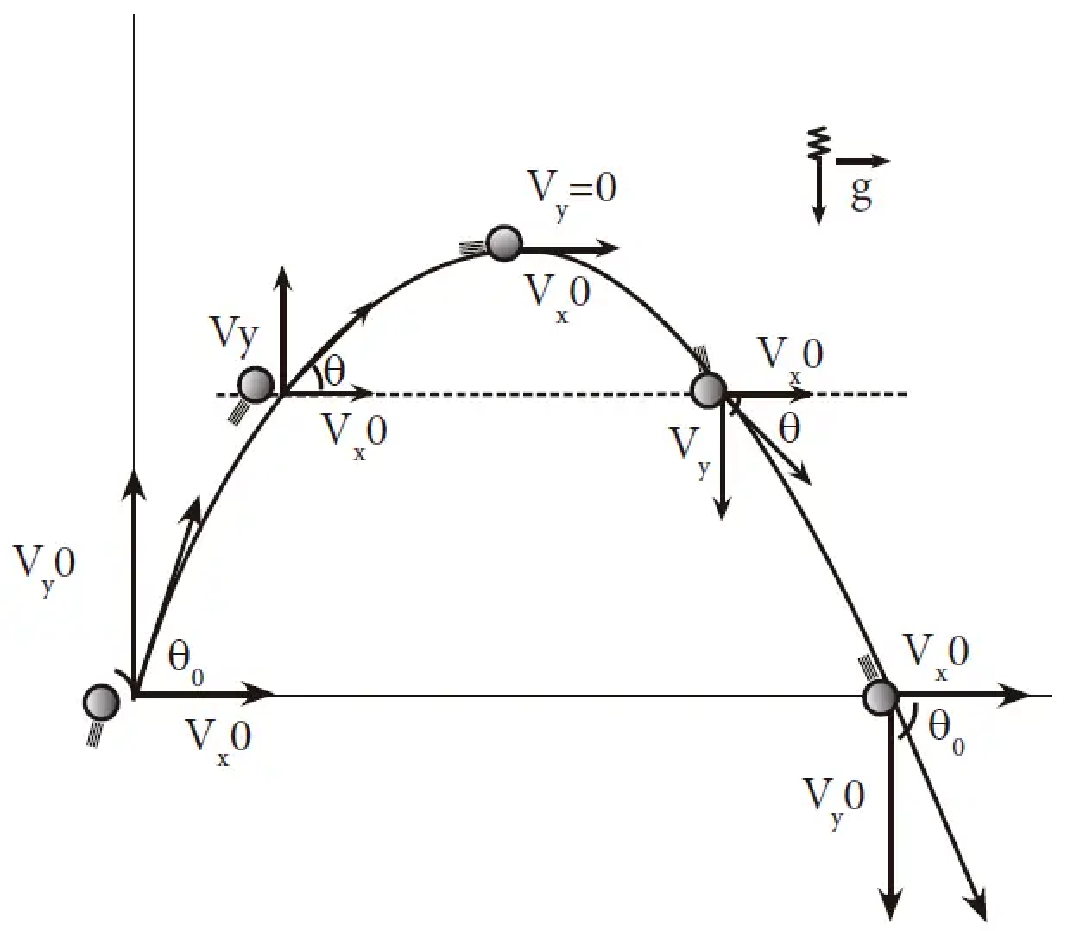
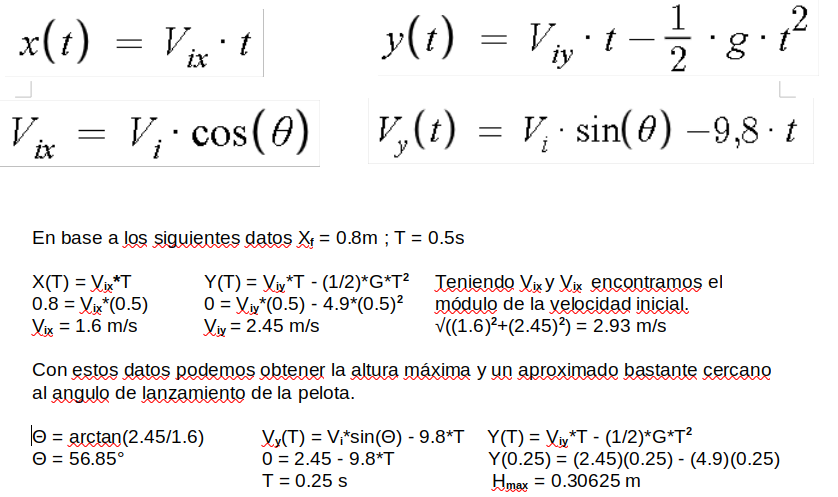
ㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤFundamentos del Lanzamiento¶
Para realizar un tiro preciso, analizamos los principios físicos involucrados en un parabolico. Esto nos permite predecir con precisión el comportamiento de la pelota.
Es esencial considerar dos tipos de movimientos para calcular el tiempo de vuelo de la pelota lanzada por el brazo mecánico.¶
En términos más detallados, estas fórmulas permitirán determinar con precisión cuánto tiempo la pelota estará en el aire antes de tocar el suelo. Esto implica
considerar la influencia de la gravedad en el movimiento de la pelota y calcular el intervalo de tiempo en el cual la pelota experimenta una trayectoria parabólica
descendente. Este enfoque es crucial para comprender y prever el comportamiento del proyectil lanzado, lo que puede ser esencial para optimizar su rendimiento o realizar
ajustes necesarios en el diseño del brazo mecánico.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}