Análisis y Diseño » History » Version 27
« Previous -
Version 27/95
(diff) -
Next » -
Current version
Cesar Jimenez, 11/22/2023 08:44 AM
ㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤWikipedia¶

Grupo A:
Integrantes: Cristian Sánchez, Jean Pier Duran, Sergio Rabanal, Valentina Álvarez, César Jiménez
Nombre del Producto: Machine EV3 G
Modulo: Proyecto I
Docente: Humberto Urrutia
Fecha de Inicio: 2023-08-14
Fecha de Termino: 2023-11-30
ㅤㅤㅤㅤㅤㅤㅤÍndice:
- Introducción
- Descripción y Objetivos
- Organización y Planificación
- Análisis y Diseño
- Código e Implementación
- Bibliografía
ㅤㅤㅤ
ㅤㅤ
h1. ㅤㅤㅤㅤㅤㅤAnálisis y Diseño
Especificación de Requerimientos funcionales y no funcionales¶
Requerimientos funcionales:¶
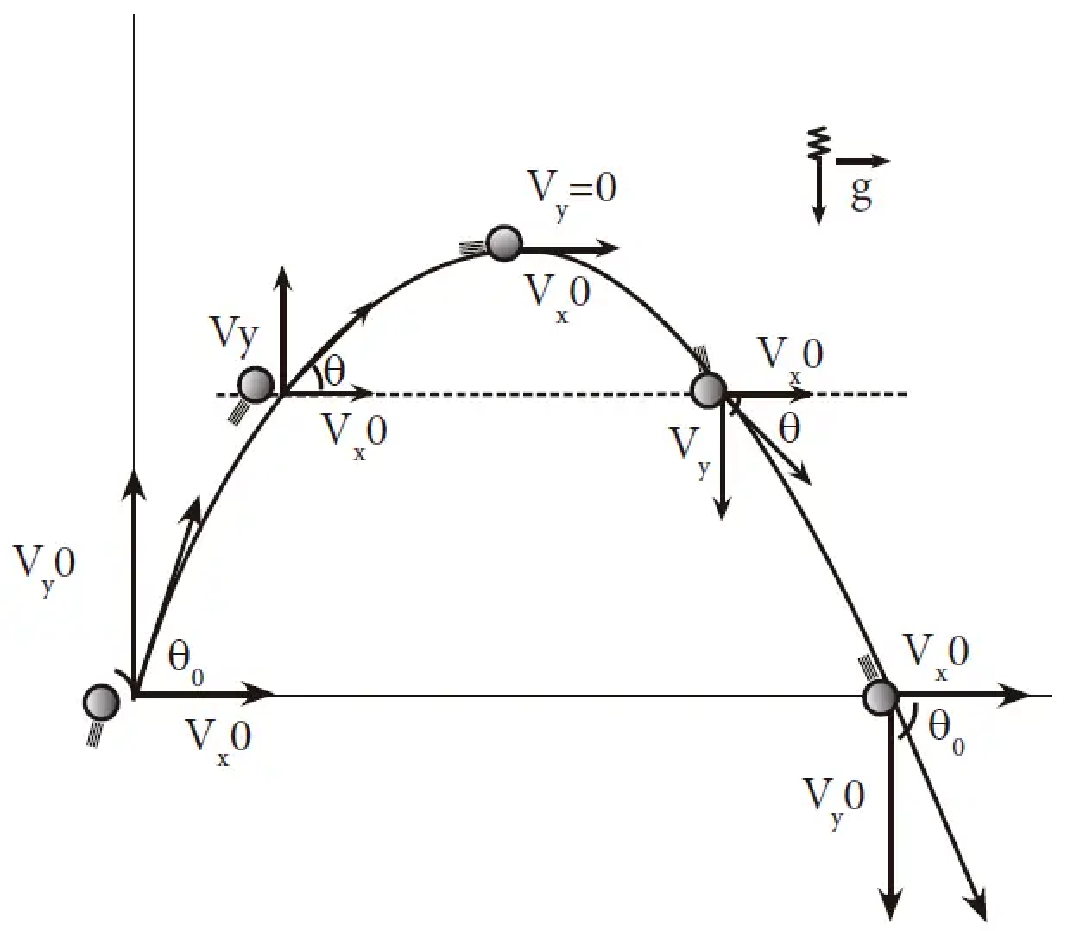
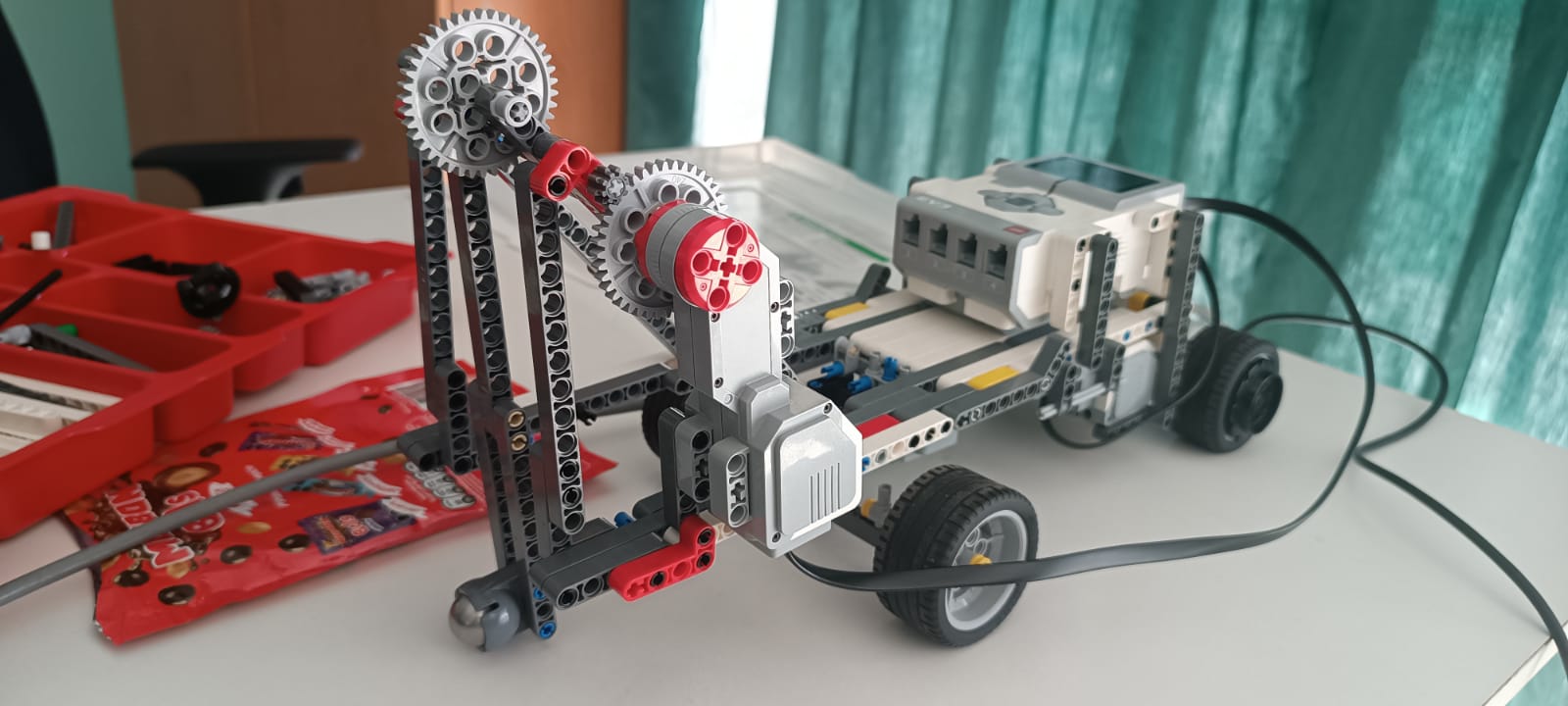
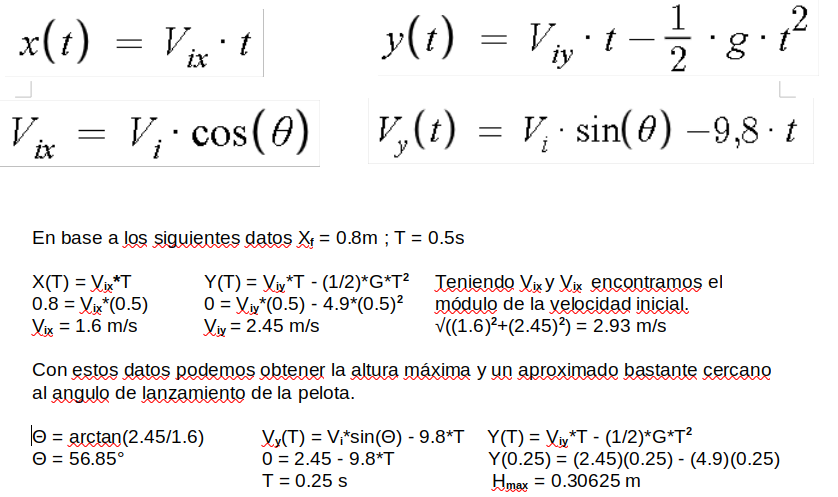
• El robot tiene que ser capaz de jugar al golf mediante un palo mecánico que lance la pelota.
• El robot debe poder ser capaz de moverse en distintas direcciones para ajustarse a la posición de la pelota.
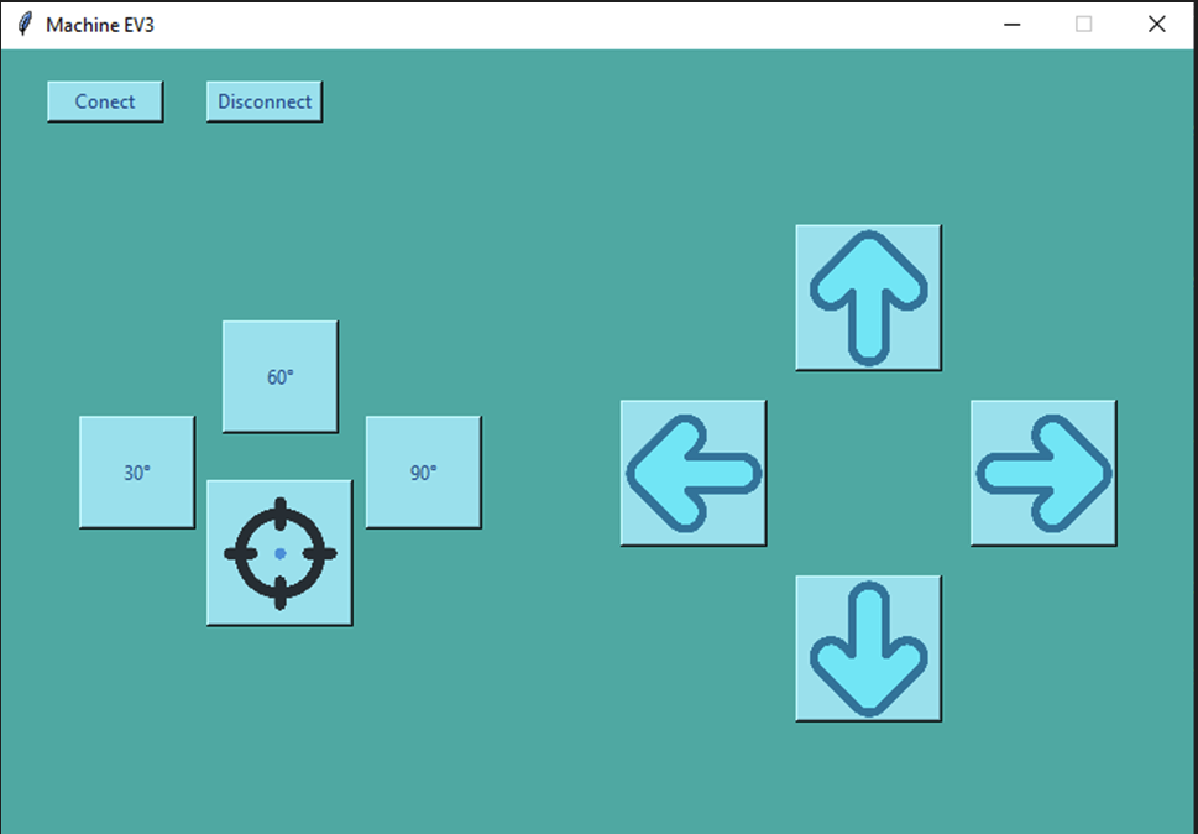
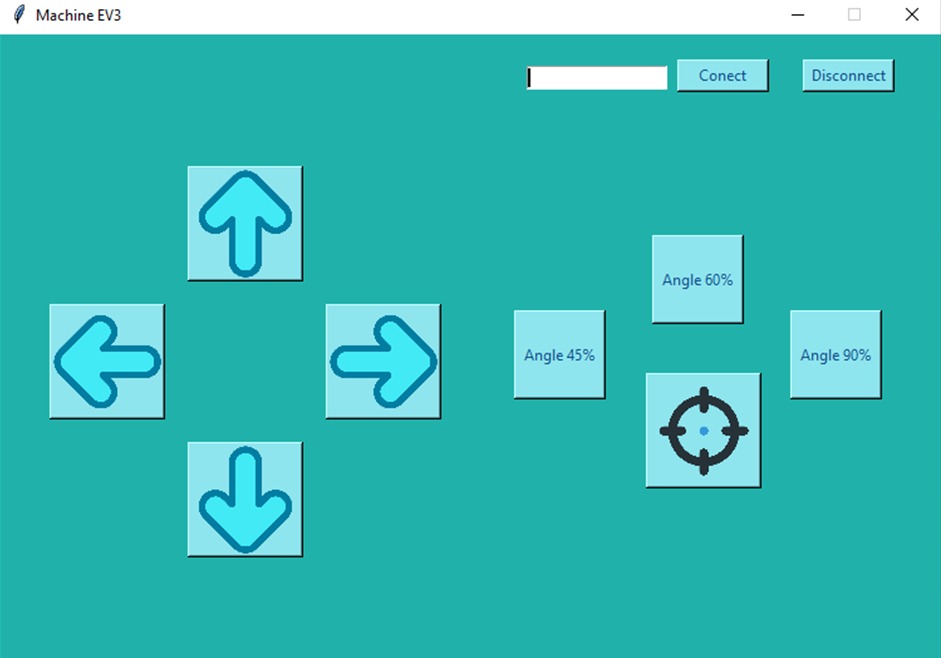
• El robot ha de ser controlado por el usuario mediante una interfaz gráfica implementada por los programadores,
utilizando un computador capaz de ejecutar dicha interfaz.
Requerimientos no funcionales:¶
• La construcción del código junto con sus respectivos algoritmos serán hechos desde el lenguaje de programación Python.
• La interfaz gráfica ha de ser sencilla para el manejo del usuario, de modo que pueda realizar movimientos de forma fluida y poder ajustar el potencial de
disparo de la pelota.
• El entorno de desarrollo y diseño en el aspecto de la programación debe ser llevado en el sistema operativo linux, debido a las comodidades que este presenta
en el tema de sus librerías.
• El robot tiene que tener una ejecución fluida de sus movimientos o acciones.
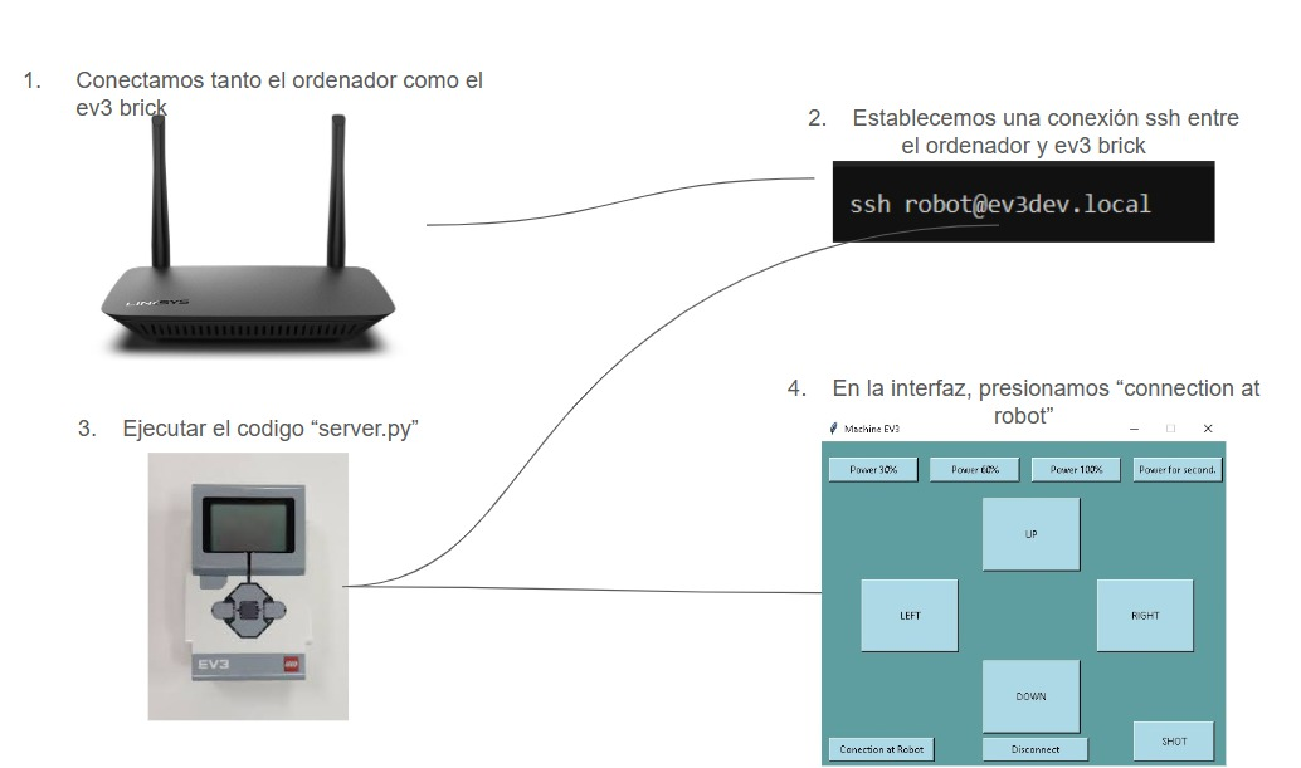
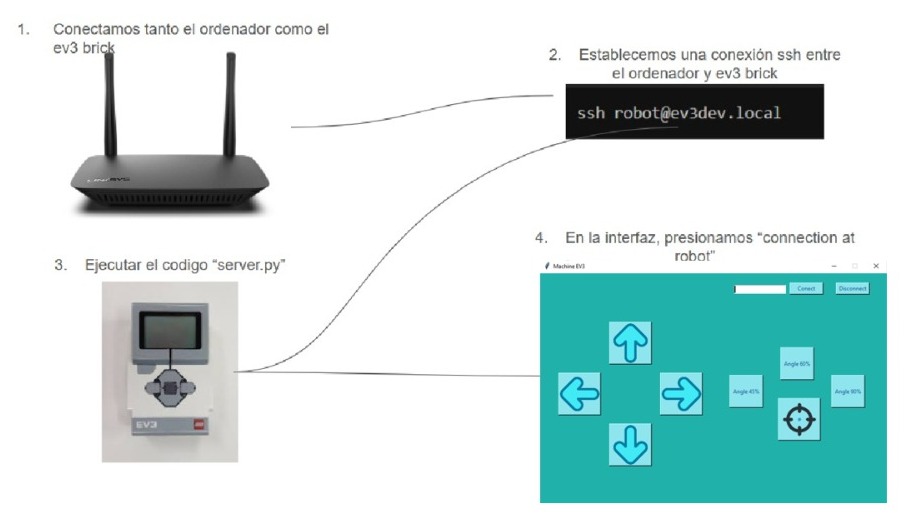
ㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤArquitectura
 ¶
¶
• El ladrillo EV3 y el notebook deben estar conectados a la misma red WIFI.
• La interfaz gráfica permite controlar al robot en todos sus apartados disponibles mediante una conexión remota.
• La conexión remota se lleva a cabo mediante la ejecución del programa Server.py, enlazando las funciones del programa con el robot.
• El robot ejecutará las acciones indicadas por el usuario que opera en el notebook mediante la interfaz gráfica.¶
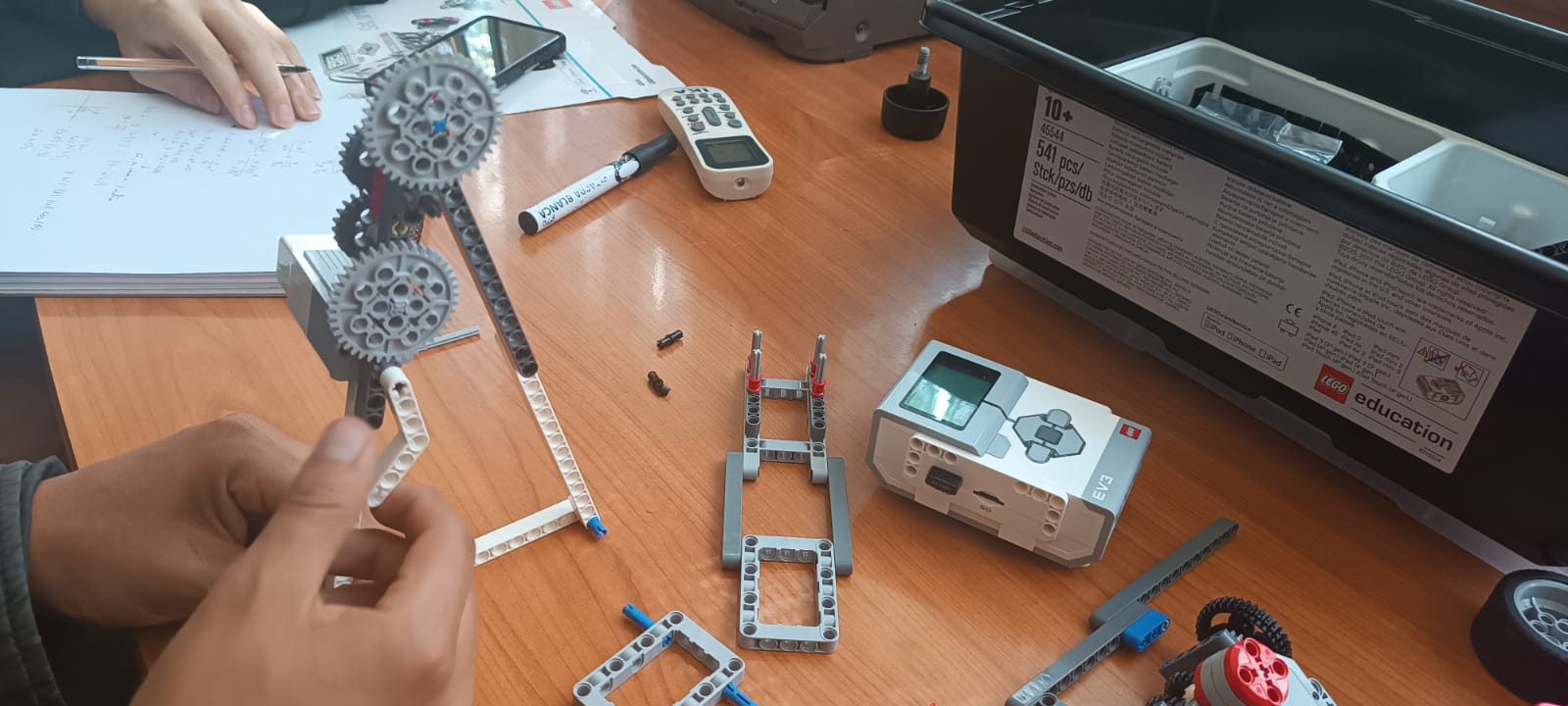
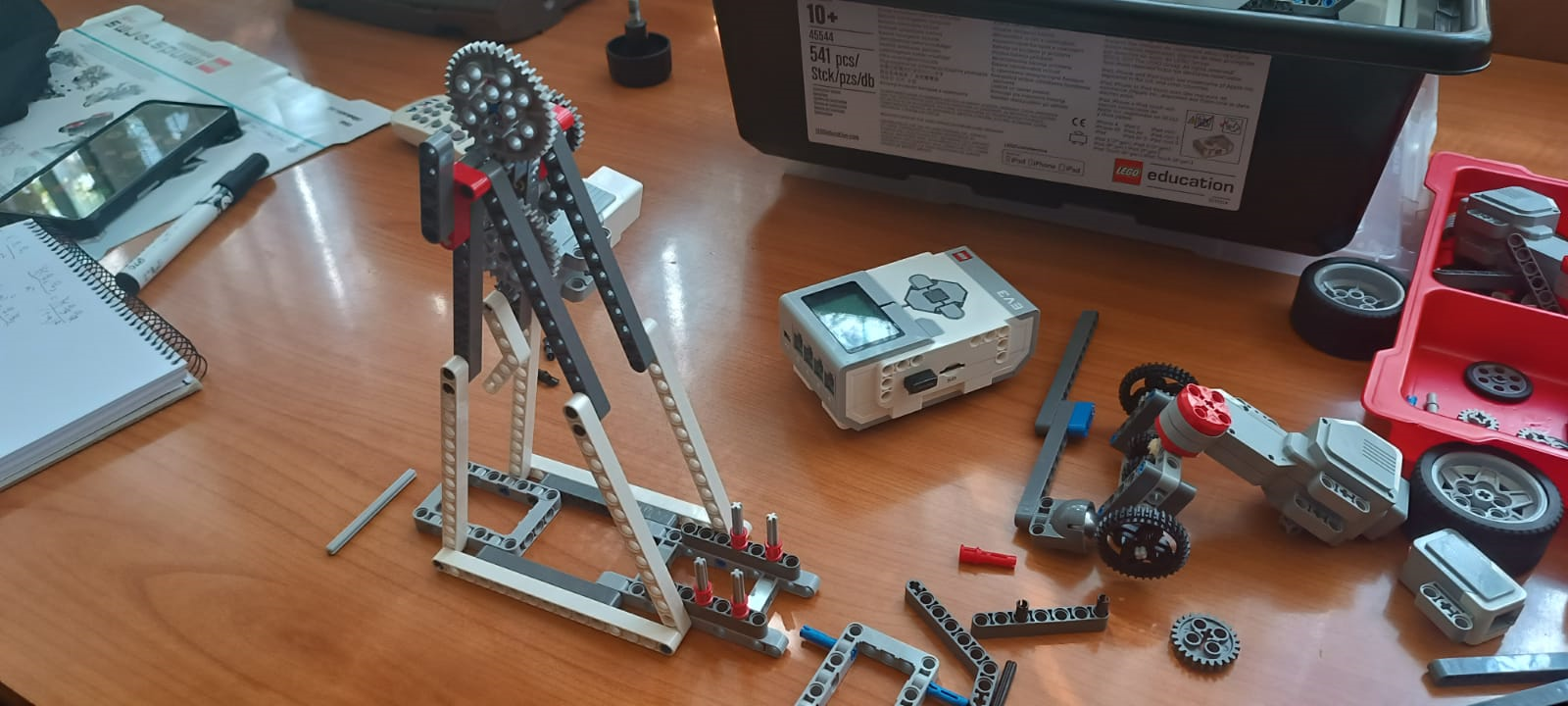
ㅤㅤㅤㅤㅤConstrucción de la parte inferior del robot(Movilización del robot)¶
ㅤㅤ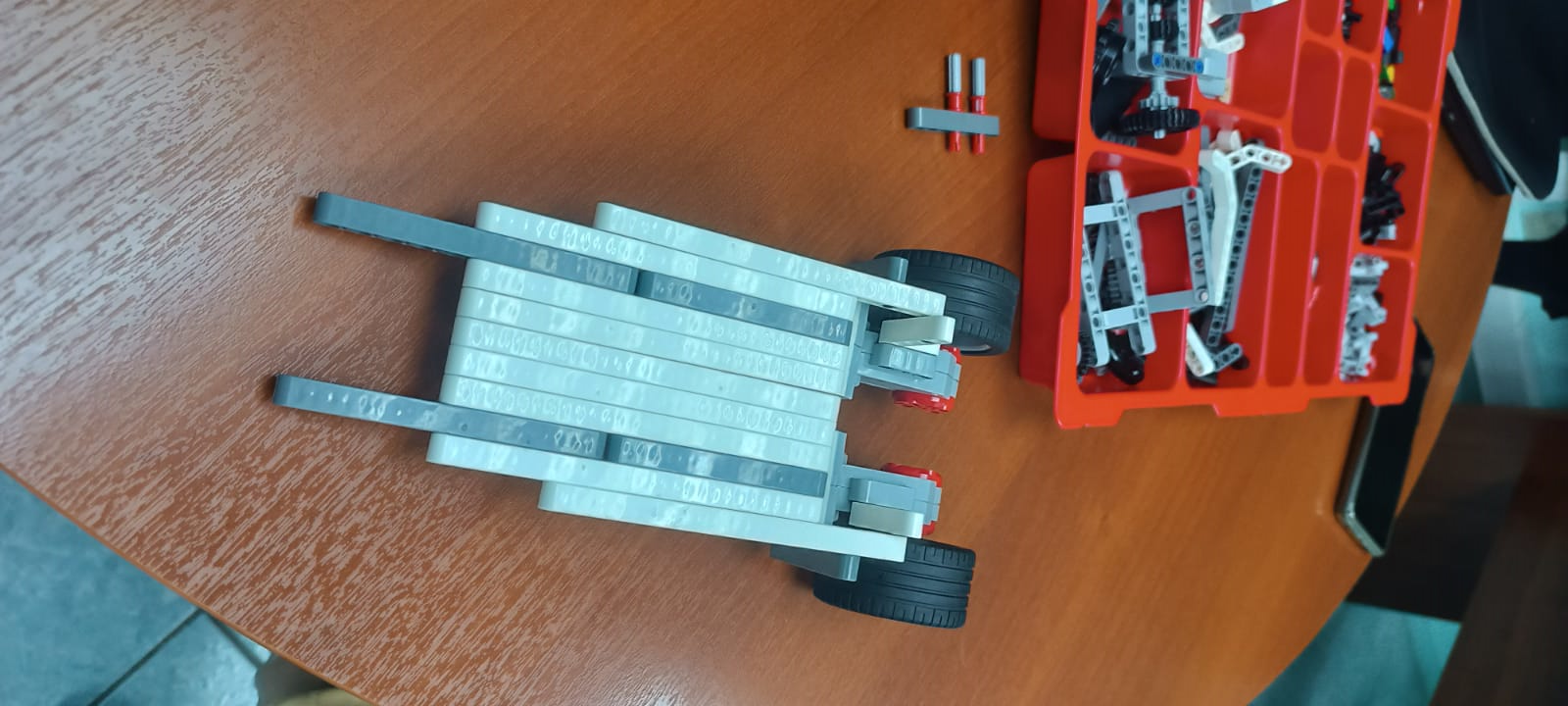



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}