WIKI "ROBOT HU45C4R-T800"¶
1. PRESENTACIÓN
1.1. INTEGRANTES:- Chang Reyes, Patricio.
- Cortez Escobar, Cristina.
- Varas Burgos, Pablo.
- Rivero Salas, Dylan.
1.2. DISTRIBUCIÓN DE TAREAS:
| ROL | DESCRIPCIÓN | ASIGNACIONES |
| Programador(es) |
Encargado de crear, diseñar y perfeccionar el código con el que funcionará el robot. |
-Dylan Rivero. -Patricio Chang. |
| Ensamblador(es) |
Encargado de armar el robot de forma que funcione óptimamente y cumpla con los objetivos señalados. |
-Cristina Cortez. -Pablo Varas. -Patricio Chang |
| Escritor(es) |
Encargado de realizar las bitácoras e informes de avances del equipo. | -Dylan Rivero. |
| Fotógrafo(s) |
Encargado de fotografiar y grabar los avances del equipo. |
-Pablo Varas. |
| Documentador(es) |
Encargado de ingresar los avances realizados por el equipo a la plataforma “Redmine”. |
-Dylan Rivero. -Cristina Cortez. -Pablo Varas. |
2. OBJETIVOS
2.1. OBJETIVO GENERAL:
- Realizar el armado del Robot según el manual escogido por el grupo, con la finalidad de que lance ligas de plástico,
contando, además, con un sistema de movimiento automatizado.
2.2. OBJETIVOS ESPECÍFICOS:
- Construir el robot “HU45C4R T-800”, en base al manual escogido.
- Realizar pruebas y verificar su íntegro funcionamiento.
- Desarrollar una forma de control de movimiento de forma remota.
- Realizar la programación del robot para que funcione correctamente.
- Implementar programa en tarjeta SD para operar el robot.
3. RESTRICCIONES
- La programación debe ser realizada Python.
- El trabajo tendrá que ser realizado en los plazos impuestos.
- Toda la documentación tiene que ser publicada en la plataforma “Redmine”.
- El robot no puede provocar daños a terceros.
- El movimiento del robot no podrá ser manual, solo automatizado.
4. DESGLOSE DE COSTOS
| RECURSO | VALOR/VALOR ESTIMADO |
| Notebooks/computadores. |
$1.200.000.- |
| Tarjeta MicroSD. |
$4.000.- |
| IDE Visual Studio Code. |
$0.- |
| Kit LEGO Mindstorms ev3 Education. |
$300.000 - $450.000.- |
| Dongle USB WIFI TP LINK. |
$10.000.- |
| Kits de piezas extras. |
$100.000.- |
| Recursos humanos. |
$5.400.000.- |
| VALOR TOTAL APROXIMADO |
$7.209.000.- |
5. INTERFAZ DE USUARIO

- Flechas: movimiento del robot.
- Círculo: disparo de proyectil.
- 0 y 45 grados: posicionamiento del cañón.
- Conectar y Desconectar: conexión y desconexión de la interfaz con el robot.
- Cuadro de texto: ingreso de la IP del robot.
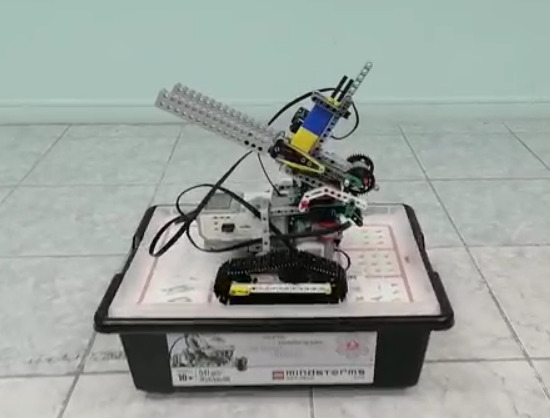
6. GALERÍA DEL ROBOT
ㅤ
ㅤ
ㅤ
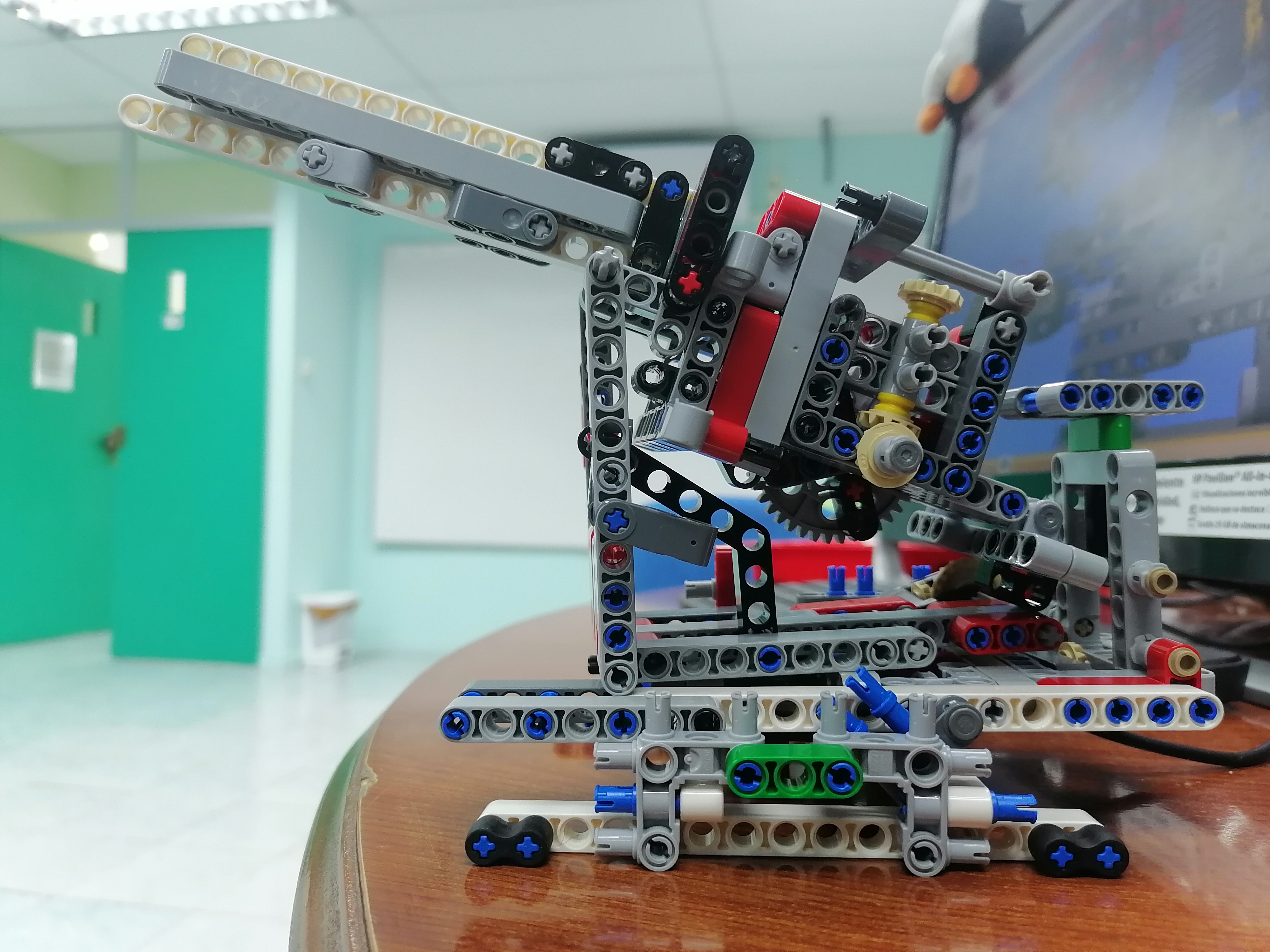
7. PRUEBAS DEL ROBOT
Respecto a las pruebas de movimiento, en los primeros prototipos el robot se movía despacio por lo que se hicieron cambios en el diseño para aumentar su velocidad.
Respecto a las pruebas de disparo, se encontraron problemas de atascamiento de las piezas de disparo de vez en cuando y la solución fue simplemente moverlas un poco.
Respecto a la estabilidad se encontraron diversos problemas que sirvieron para construir los demás diseños del robot y de esta forma evitar que el robot tenga problemas de peso o inestabilidad.
8. CONCLUSIONES DEL PROYECTO
- Conclusiones:
Para la última fase del proyecto, todas las tareas se encuentran terminadas ya sea de documentación, diseño o programación.
A diferencia de las primeras fases, no hubo problemas de tiempo u organización.
Se espera utilizar los conocimientos aprendidos en esta asignatura para facilitar el trabajo en futuros proyectos.
{kind=link}