Avances en el desarrollo del Robot » History » Version 15
« Previous -
Version 15/16
(diff) -
Next » -
Current version
catalina ramirez, 10/21/2024 01:15 AM
Avances en el desarrollo del Robot¶
Versión Beta¶
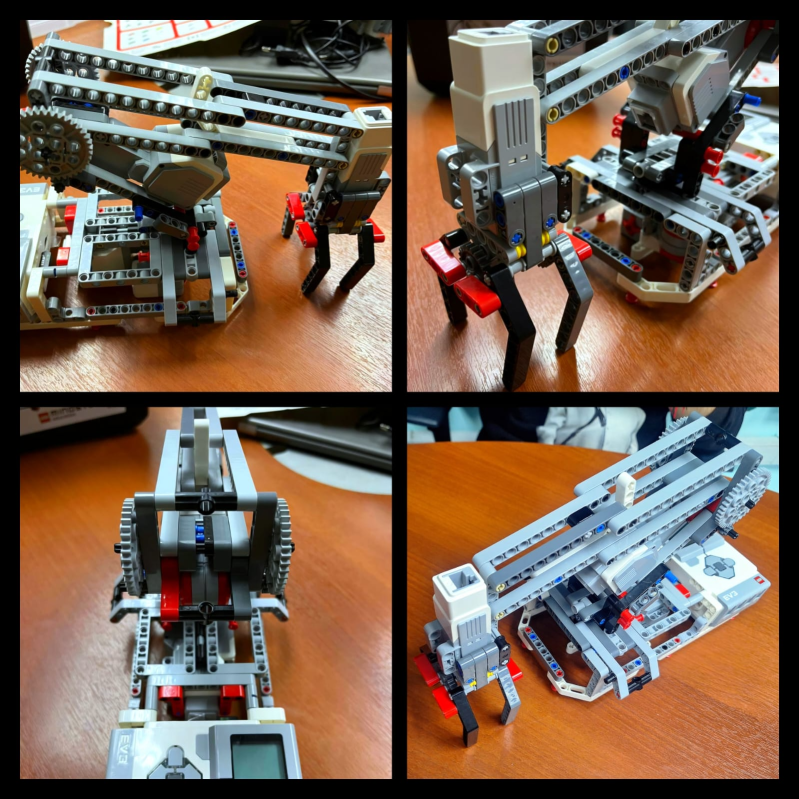
Esta versión beta del robot fue desarrollada como un prototipo preliminar con el objetivo de evaluar la funcionalidad básica de su sistema de movilidad y probar un diseño inicial de garra. Utilizando componentes de Lego Mindstorms EV3, se colocaron ruedas junto a la batería para comprobar el desplazamiento del robot en direcciones básicas como adelante y atrás. Por lo que igualmente se diseñó una garra rudimentaria, aunque incompleta debido a la falta de piezas. A pesar de no estar finalizada, la garra mostró capacidad de apertura y cierre, lo que permitió validar el concepto inicial de su mecanismo. Esto fue para verificar que las funciones esenciales podrían ser implementadas con éxito para establecer una base sólida para la construcción de la versión definitiva del robot.

Primera Versión¶
La primera versión del robot construido con el Kit Lego Mindstorms EV3 incluye una garra mecánica diseñada para agarrar objetos sólidos, una vez que se implemente el código en lenguaje de programación Python. El diseño incorpora un espacio para la batería y conexiones a los motores, que controlarán los movimientos y acciones del robot. Aún no se ha integrado el sistema de ruedas para su desplazamiento, ni otras funcionalidades adicionales. El robot está cableado para utilizar los puertos del EV3. que permiten conectar tanto los sensores como los motores, esenciales para su futura operatividad.
Segunda Versión¶
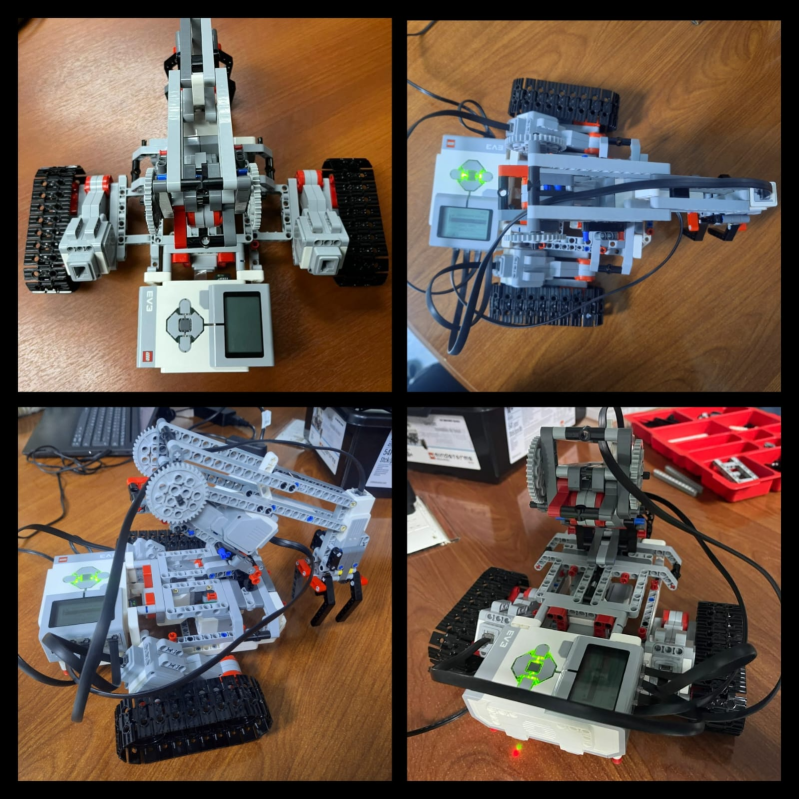
En esta segunda versión del robot, se han incorporado los motores que permiten su desplazamiento, logrando movimientos hacia adelante y atrás. Sin embargo, aún no es capaz de girar sobre su propio eje, lo que impide los desplazamientos laterales hacia la izquierda y derecha. El sistema de agarre sigue presentando dificultades, ya que requiere un ajuste preciso para evitar dañar las piezas del robot al intentar agarrar objetos específicos. Hasta el momento, el avance con el robot se ha llevado a cabo múltiples pruebas para determinar el límite adecuado de fuerza en el agarre y alcanzar un funcionamiento óptimo sin comprometer la integridad estructural del robot.
Tercera Versión¶
En esta tercera versión del robot, se han logrado avances significativos en su desplazamiento, permitiéndole rotar sobre su propio eje y moverse hacia adelante, atrás, izquierda y derecha con precisión. El sistema de agarre ha sido optimizado, logrando un control preciso que permite recoger objetos sin dificultades, como el caso de una pelota de ping pong, que es el objetivo principal del proyecto. Además, se ha incorporado un sensor de cámara, que mejora la capacidad del robot para identificar objetos en la superficie y guiarse hacia ellos de manera eficiente. Aunque la cámara no era un requisito obligatorio, se agregó por razones funcionales y estéticas, facilitando un control más preciso desde la interfaz gráfica y mediante un Joystick, si el usuario lo prefiere. Adicionalmente, se han incluido elementos decorativos para mejorar el aspecto visual del robot, complementando con su funcionamiento actual.
