Wiki » History » Version 39
« Previous -
Version 39/44
(diff) -
Next » -
Current version
francisco pantoja, 12/06/2022 09:03 AM
intento de wiki
P1NW1N3CH0 H1R4N3 edición Antártica¶
Objetivo del Proyecto¶
Objetivo General¶
Aplicar los conocimientos informáticos e ingenieriles necesarios para construir un robot que pueda controlares de manera remota, se capaz de moverse y pueda también lanzar un proyectil.
Formulación del Proyecto¶
Objetivos específicos¶
A corto plazo:- Aprender a usar la plataforma Redmine
- Aprender a programar el robot
- Entender e ingeniar soluciones para el funcionamiento eficiente del robot
- Adecuarnos a las posibles dificultades que surjan a lo largo del desarrollo del proyecto
- Manejar la conexión entre computador y robot
- Implementar las funciones con las librerías necesarias
- Diseñar e implementar un sistema de disparo y hacer el cálculo necesario para volverlo preciso
- Diseñar e implementar el resto de sistemas necesarios para que el robot funcione correctamente
Organización del Personal (Roles)¶
Jefe de Grupo: Francisco Pantoja (Jefe de Grupo y Vocero de Grupo)
Tomás Silva (Administrador Logístico)
Daniel Alday (Programador)
Benjamín Gómez (Ensamblador)
| Rol de Grupo | Descripción del engargado de grupo | Nombre |
| Jefe de Grupo | Encargado de Redacción de Informes | Francisco Pantoja |
| Analista Logístico | Encargado de Reporte y Documentación | Tomás Silva |
| Ensamblador | Encargado de Construcción e Ingeniería | Benjamín Gómez |
| Programador | Encargado de Programación | Daniel Alday |
Planificación de recursos¶
Recursos Materiales e Inmateriales
| Categoría | Recurso | Cantidad | Costo |
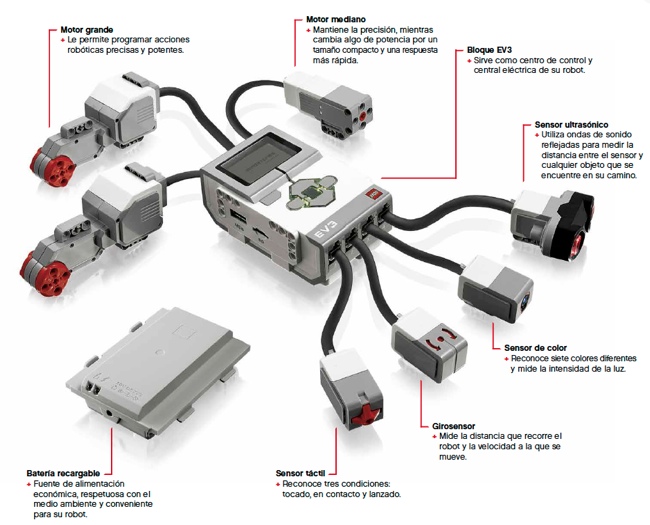
| Hardware | Kit LEGO MINDSTORMS ev3 | 1 | CLP $ 1.000.000 |
| Computadoras | 1 | CLP $ 800.000 | |
| Adaptador Wifi | 1 | CLP $ 10.000 | |
| Tarjeta SD (8Gb) | 1 | CLP $ 8.000 | |
| Piezas extras | Ind. | Gratuito (Por la Institución) | |
| Software | Visual Studio Code | - | Gratuito |
| Discord (Sin Nitro) | - | Gratuito | |
| - | Gratuito | ||
| Nano | - | Gratuito | |
| S.O. ev3_dev | - | Gratuito | |
| Servicios | Plataforma Redmine | - | Gratuito (Por la Institución) |
| Google Workspace | 1 plan | Gratuito (Por la Institución) | |
| Licencia Microsoft 365 Empresa Básico | 1 plan | USD $ 6.00 por mes; ≈ CLP $ 34.000 en 6 meses |
Costo Hora
| Rol encargado | Horas Asignadas | Semanas de Trabajo | Valor Hora | Costo Total |
| Jefe de Grupo | 8 Horas por semana | 16 Semanas | CLP $20.000 | CLP $ 2.560.000 |
| Analista Logístico | CLP $18.000 | CLP $ 2.304.000 | ||
| Programador | CLP $25.000 | CLP $ 3.200.000 | ||
| Ensamblador | CLP $22.000 | CLP $ 2.816.000 | ||
| Costo Total | CLP $ 10.880.000 | |||
Estimación costo total proyecto: $12.732.000 CLP (doce millones, setecientos treinta y dos mil pesos chilenos)
Análisis y Diseño¶
Journal¶
Sobre el formateo de la wiki, se investigó sobre Textile, un lenguaje que permite el formato en la Wiki
Textile lang
- se vio la posibilidad de realizar una interfaz con un lenguaje anteriormente investigado, especializado en interfaces gráficas además de ser móviles
- se vio la posibilidad de usar un servidor RPyC para el manejo de órdenes para el robot, esperando que sea mucho mejor que la alternativa bluetooth
1er Objetivo: Hacer posible el envío simple de palabras claves a través de la conexión cliente-servidor se pudo
2do Objetivo: Lograr hacer funcionar funciones más complejas
- se vio la posibilidad de usar otra librería alternativa para la conexión robot-computador, la librería llamada Socket, mucho más fácil de ocupar y parece que contiene los mismos beneficios
- se vio la posibilidad de usar la librería pynput, que facilita el entendimiento de las pulsaciones del teclado, transformándolas en objetos muchos más simples para el código
Análisis y Diseño
h2. Especificación del Requerimiento¶
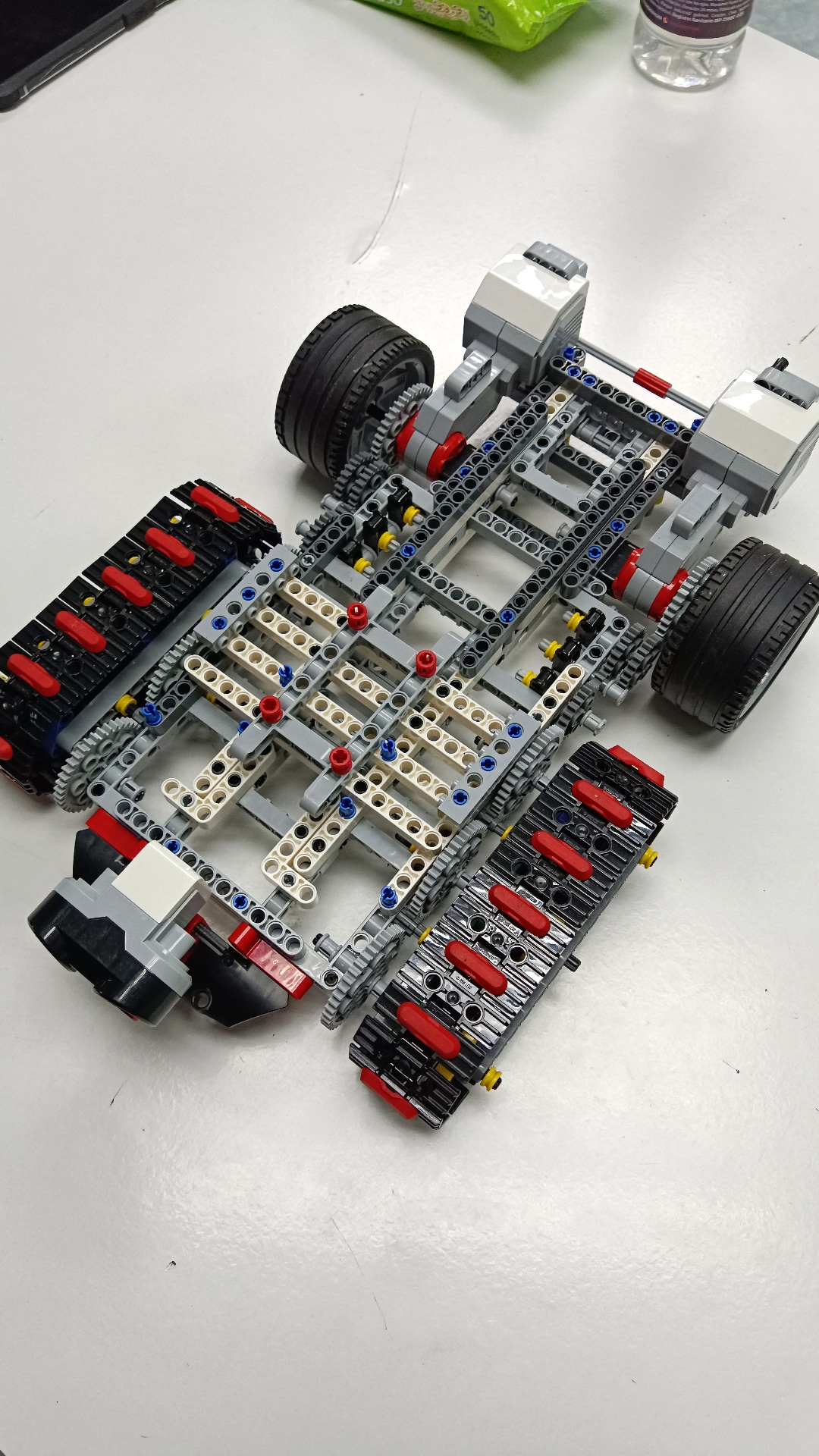
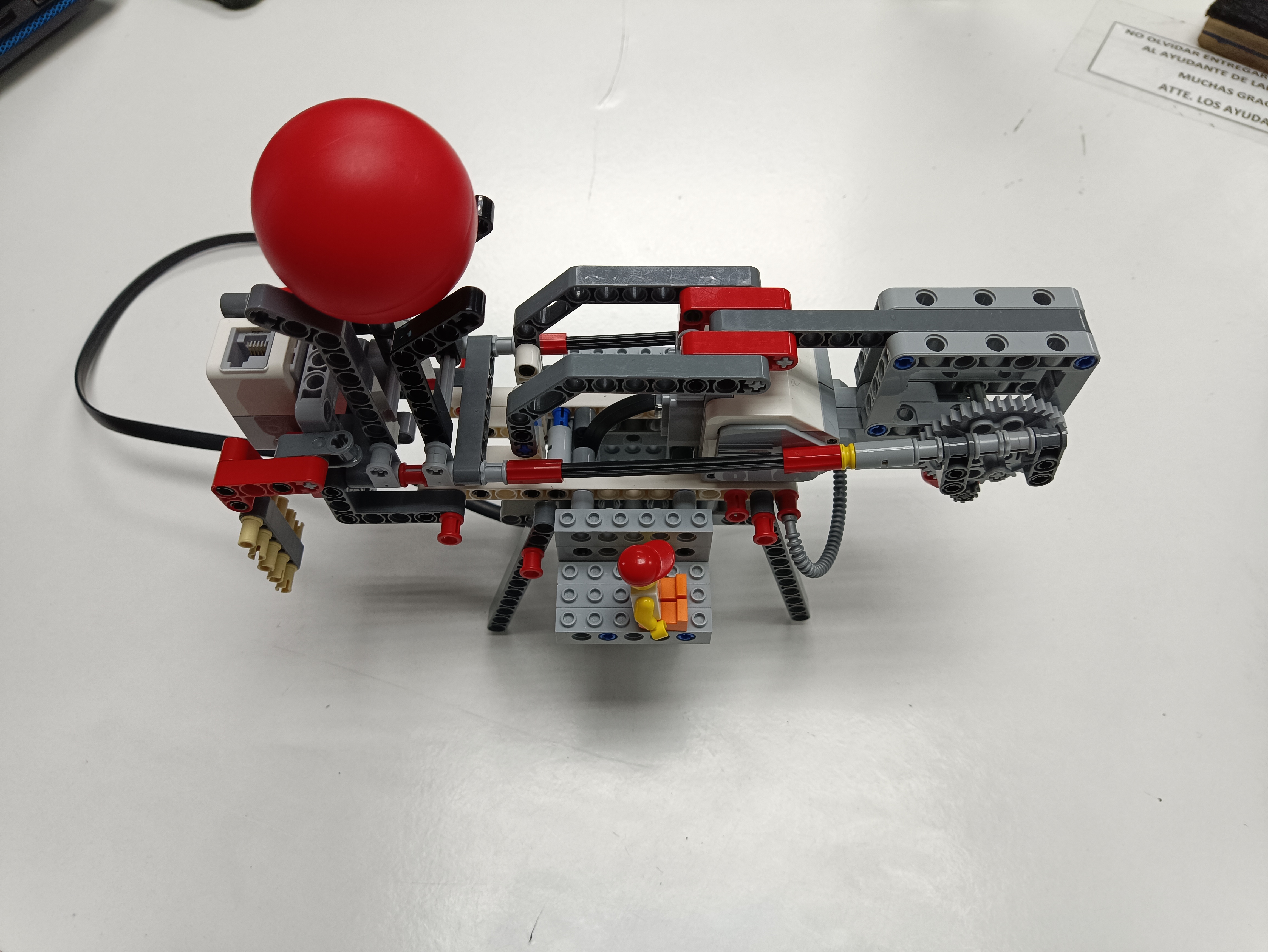
El robot deberá ser capaz de moverse y disparar a un objetivo determinado. El disparo
se efectuará utilizando un proyectil y su trayectoria tendrá que ser calculada siguiendo
el modelo de lanzamiento parabólico (ideal) visto en la asignatura de mecánica clásica.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}