Proyecto Ball-E¶

Índice
Introducción y Planificación¶
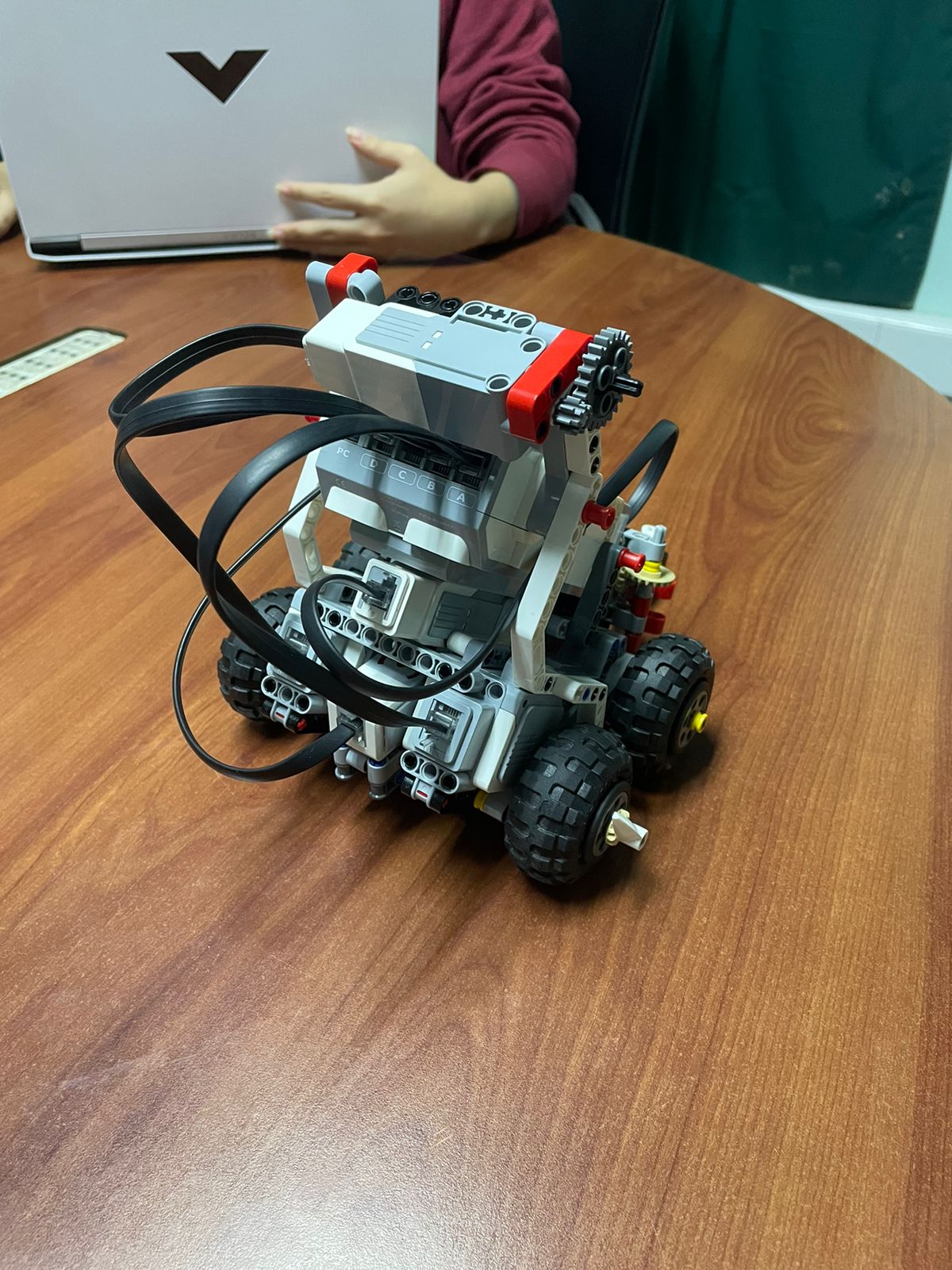
El proyecto Ball-e consiste en un robot interactivo diseñado para que el usuario pueda recoger y transportar una pequeña pelota a cualquier destino accesible dentro de su entorno.
Este robot ha sido construido utilizando LEGO Mindstorms Education EV3, y su funcionamiento está impulsado por un algoritmo desarrollado en Python.
La planificación de este proyecto será mediante bitácoras y carta Gantt.
Objetivos del Proyecto¶
Objetivo General:
Desarrollar un robot EV3 que permita al usuario mover el robot y transportar una pelota de un lugar a otro, a través de una interfaz gráfica realizada en Python.
Subobjetivos:
Realizar bitácoras del proceso semanal de nuestro proyecto, informes y presentaciones de nuestro trabajo.
Trabajar en el proyecto con el sistema operativo Linux, ocupar Visual Studio Code para programar junto a la librería de LEGO® MINDSTORMS® EV3 MicroPython.
Realización de conexión de nuestro robot EV3 al servidor.
Organización del Equipo¶
Estos son los roles de cada uno del equipo, actualizada con los cambios de roles a mitad de proyecto.
| ROL | DESCRIPCIÓN | RESPONSABLE | INVOLUCRADOS |
|---|---|---|---|
| Jefe de Grupo | Encargado de la planificación y ejecución del proyecto | André Guerra | André Guerra |
| Programador | Responsable de la implementación del código | Fernando Díaz | André Guerra, Alonso Kalise, Christopher Romo, Diego Pizarro, Fernando Díaz |
| Diseñador | Diseñador de logo y creación del Robot | Alonso Kalise | Alonso Kalise, Christopher Romo |
| Documentación | Identifica y documenta los requisitos del proyecto | Diego Pizarro | André Guerra, Alonso Kalise, Diego Pizarro, Fernando Díaz |
Gestión de Riesgo¶
| Nivel de Impacto | Descripción |
| 1 | Bajo |
| 2 | Medio |
| 3 | Alto |
| 4 | Crítico |
| Riesgo | Probabilidad de Ocurrencia | Nivel de Impacto | Acción Remedial |
| Desarme por caída del robot | 35% | 3 | Volver a construir el robot, de como estaba antes del desarme o caída. |
| Batería Descargada | 10% | 1 | Cargar la batería cada semana. |
| Rotura de pieza por caída del robot | 10% | 3 | Pedir o comprar una nueva pieza para reemplazar la rota. |
| Perdida de pieza | 40% | 2 | Intentar encontrar la pieza perdida o reemplazarla con una nueva. |
| Incapacidad o inasistencia de un integrante | 50% | 3 | Justificar la inasistencia del integrante. |
| Daño o pérdida de tarjeta SD | 5% | 3 | Comprar una nueva tarjeta SD. |
| Escasez de piezas | 2% | 2 | Comprar las piezas necesarias. |
| Mala Estimación del tiempo | 60% | 3 | Reorganizarse como grupo con el tiempo perdido y restante. |
| Reconstrucción del robot | 40% | 2 | Implementar nuevas ideas. |
Planificación de Recursos¶
costos de hardware:| Producto | Precio |
| Arriendo de 3 Notebooks(4 meses) | $ 720.000 |
| Set Lego Mindstorm (EV3) | $ 700.000 |
| Micro SD | $ 6.696 |
| Dongle USB WIFI | $ 8.000 |
| Router | $ 45.000 |
| Total: | $ 1.479.696 |
| Producto | Precio |
| Microsoft Office | $0 |
| Canva | $0 |
| Visual Studio Code | $0 |
| Total: | $0 |
Costo de Trabajador:
| Encargado | Personal | Horas trabajadas | Valor hora por trabajador | Sueldo mensual total | Sueldo total (4 meses) |
| Programador | 2 | 30 | $20.000 | $2.400.000 | $9.600.000 |
| Ensamblador | 2 | 10 | $30.000 | $300.000 | $1.200.000 |
| Jefe de grupo | 1 | 32 | $25.000 | $800.000 | $3.200.000 |
| Documentador | 3 | 25 | $15.000 | $1.500.000 | $6.000.000 |
| Diseñador | 2 | 8 | $35.000 | $280.000 | $560.000 |
| Costo Total | $20.560.000 |
| NOMBRE | COSTO TOTAL |
| Costos de Hardware | $ 1.479.696 |
| Costos de Software | $ 0 |
| Costos de Gestión | $ 20.560.000 |
| Costo total proyecto | $22.039.696 |
Progreso del robot¶


{kind=link}
{kind=link}
{kind=link}