Proyecto Ball-e » History » Version 46
« Previous -
Version 46/63
(diff) -
Next » -
Current version
diego pizarro, 09/03/2024 09:36 AM
Proyecto Ball-e¶

Índice
Introducción y Planificación¶
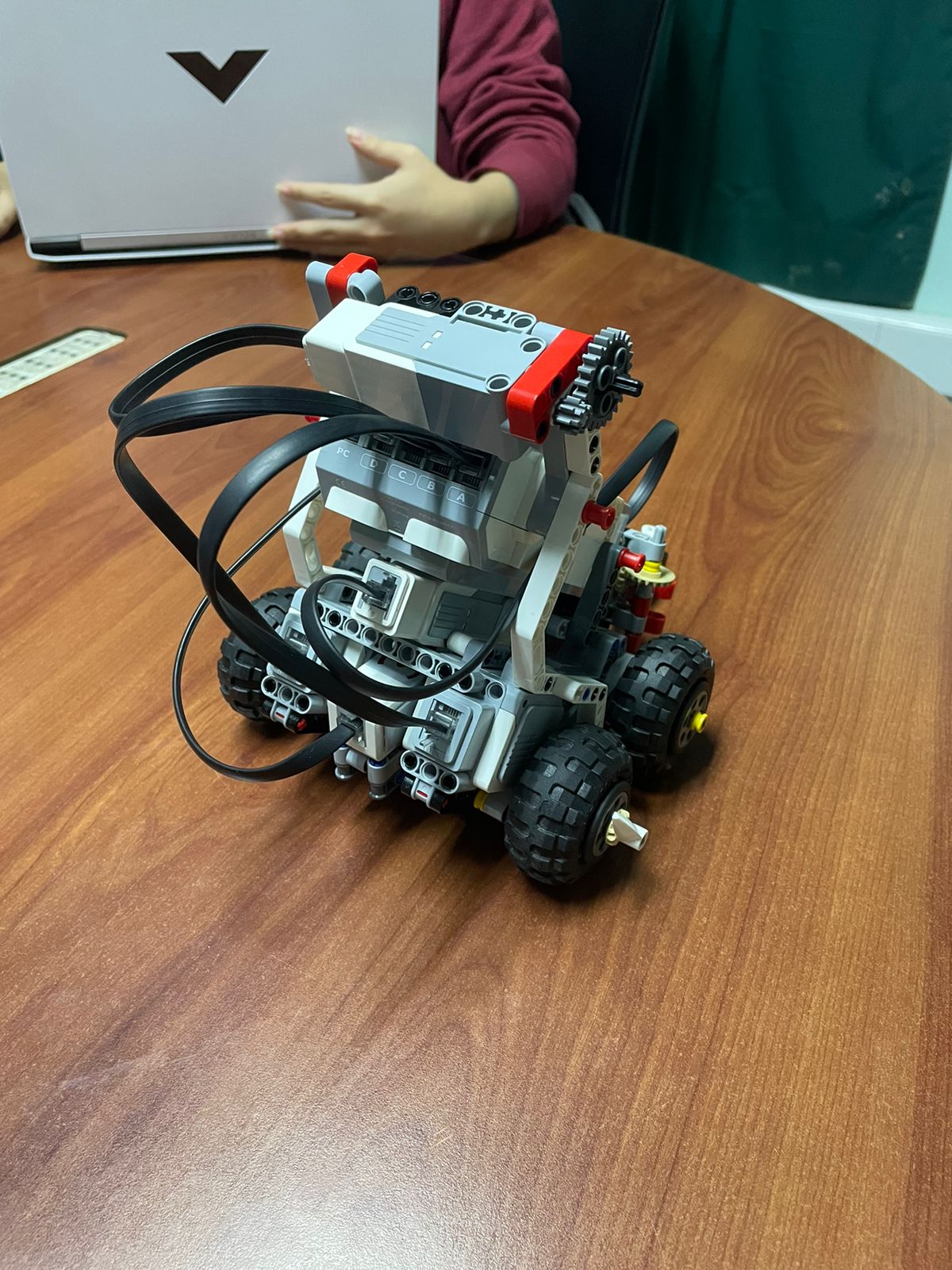
El proyecto Ball-e consiste en un robot interactivo diseñado para que el usuario pueda recoger y transportar una pequeña pelota a cualquier destino accesible dentro de su entorno.
Este robot ha sido construido utilizando LEGO Mindstorms Education EV3, y su funcionamiento está impulsado por un algoritmo desarrollado en Python.
La planificación de este proyecto será mediante bitácoras y carta Gantt.
Objetivos del Proyecto¶
Objetivo General:
Desarrollar un robot EV3 que permita al usuario mover el robot y transportar una pelota de un lugar a otro, a través de una interfaz gráfica realizada en Python.
Subobjetivos:
Realizar bitácoras del proceso semanal de nuestro proyecto, informes y presentaciones de nuestro trabajo.
Trabajar en el proyecto con el sistema operativo Linux, ocupar Visual Studio Code para programar junto a la librería de LEGO® MINDSTORMS® EV3 MicroPython.
Realización de conexión de nuestro robot EV3 al servidor.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}