Análisis y diseño » History » Version 31
« Previous -
Version 31/32
(diff) -
Next » -
Current version
Ruben Salas, 01/04/2024 07:35 PM
ANÁLISIS Y DISEÑO¶
ESPECIFICACIÓN DE REQUERIMIENTOS¶
Requerimientos Funcionales:
- Crear un servidor para poder comunicarse con el cliente.
- Mediante una interfaz gráfica moverse por los ejes (x,y) y también golpear la pelota con cierta intensidad para la simulación del palo de golf.
Requerimientos No Funcionales:
- Mecánicos: Mantener la estabilidad en todo momento al hacer que el robot cumpla sus funciones.
- Software: El robot debe estar construido únicamente por las piezas del LEGO MINDSTORMS ev3 y por las piezas adicionales prestadas y sobre la interfaz gráfica deberá ser escrita con el lenguaje de programación Python y utilizando Tkinter.
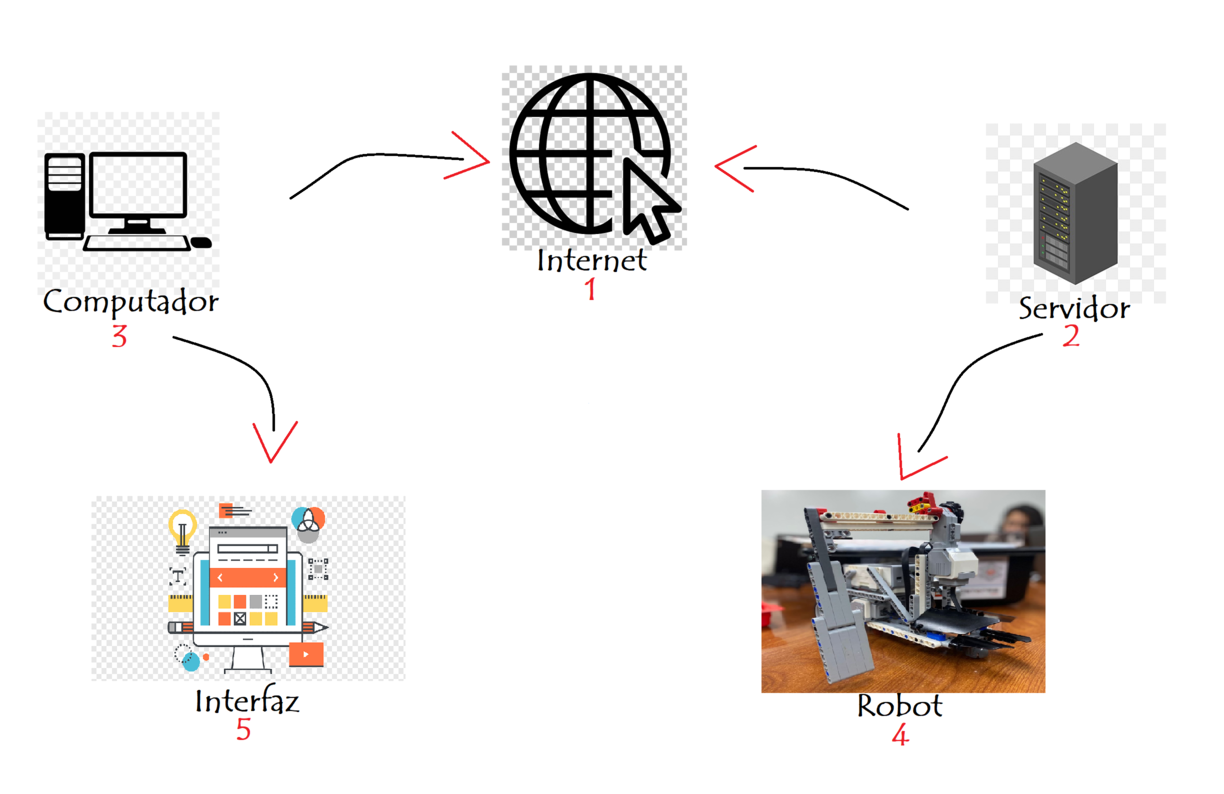
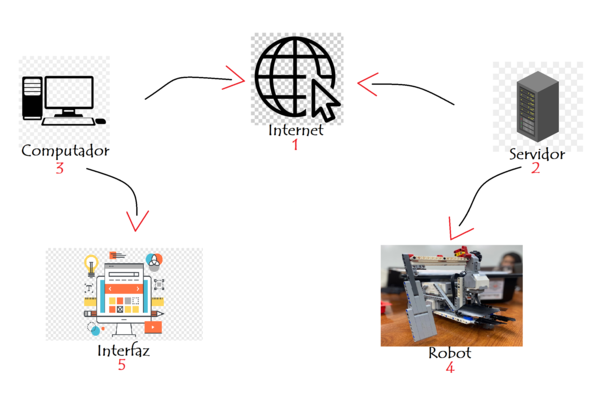
ARQUITECTURA¶
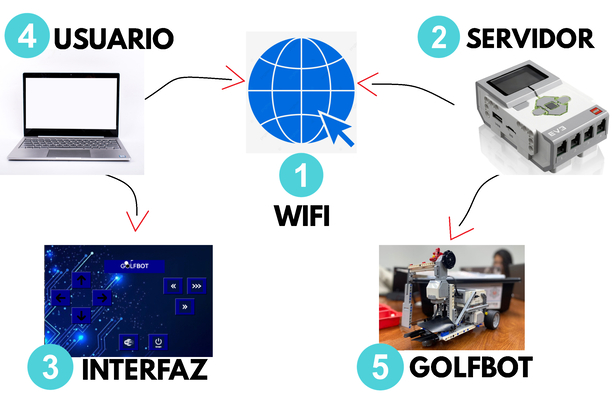
- El robot y el notebook deben estar conectados a la misma red Wifi.
- Para iniciar la conexión remota con el notebook, primero se debe ejecutar el archivo Server.py.
- El usuario debe ejecutar la interfaz gráfica para poder controlar el robot remotamente.
- La interfaz se conecta al servidor del robot, permitiendo al usuario enviar comandos para controlar el robot.
- Los movimientos del robot son ejecutados en respuesta a las instrucciones enviadas por el usuario.
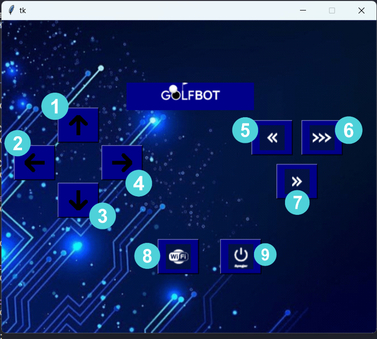
INTERFAZ GRÁFICA¶

- BOTÓN 1: Controla el movimiento hacia adelante del robot.
- BOTÓN 2: Controla el movimiento hacia la izquierda del robot.
- BOTÓN 3: Controla el movimiento hacia abajo del robot.
- BOTÓN 4: Controla el movimiento hacia la derecha del robot.
- BOTÓN 5: Realiza un golpe en reversa.
- BOTÓN 6: Realiza un golpe con mas potencia.
- BOTÓN 7: Realiza un golpe normal.
- BOTÓN 8: Establece la conexión entre el robot, el servidor y el usuario.
- BOTÓN 9: Finaliza los procesos y cierra la interfaz Tkinter.
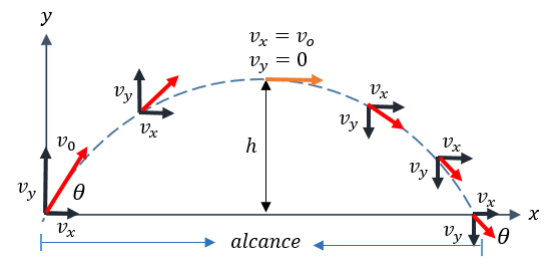
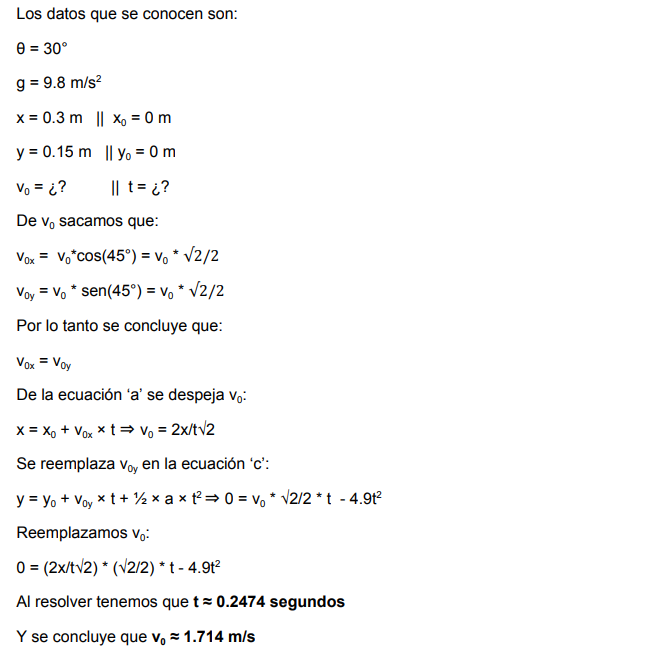
FUNDAMENTOS DE PROYECTILES¶
Actualmente “GolfBot” consta de 2 golpes distintos, un golpe suave cuyo movimiento de la pelota forma un movimiento rectilíneo uniforme (MRU).
Y otro golpe más fuerte cuyo movimiento de la pelota corresponderá a una parábola, generando un movimiento rectilíneo uniforme acelerado en el eje ‘y’.
Las ecuaciones de los movimiento son las siguientes:
{kind=link}
.png){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}