Desarrollo del Prototipo » History » Version 79
« Previous -
Version 79/80
(diff) -
Next » -
Current version
antonella butron, 11/17/2024 10:56 PM
Desarrollo del Prototipo¶
Avance del robot EV3¶
Robot se mueve solo (video)¶
Movimiento de la Garra (video)¶
| Versión | Imagen |
| Versión Beta |  |
| Versión 1 | 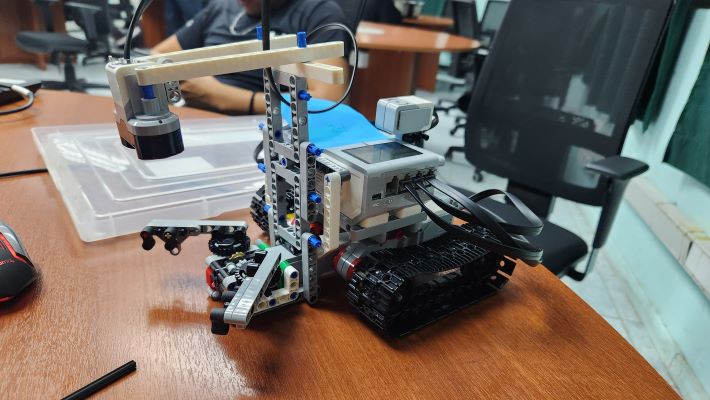 |
| Versión 2 | 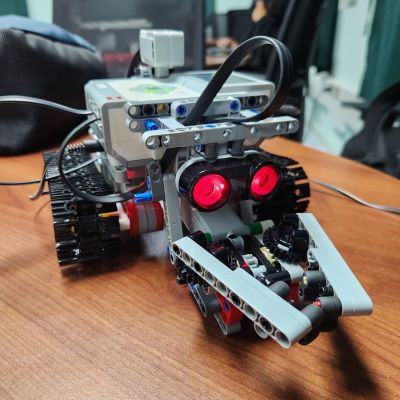 |
| Versión 3 | 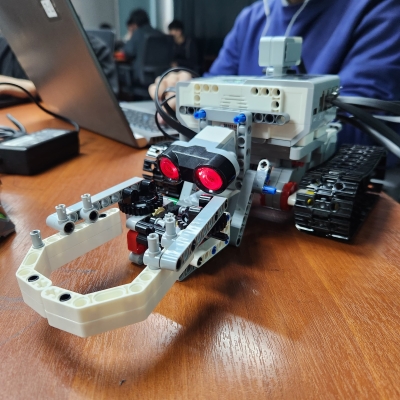 |
| Versión 4 | 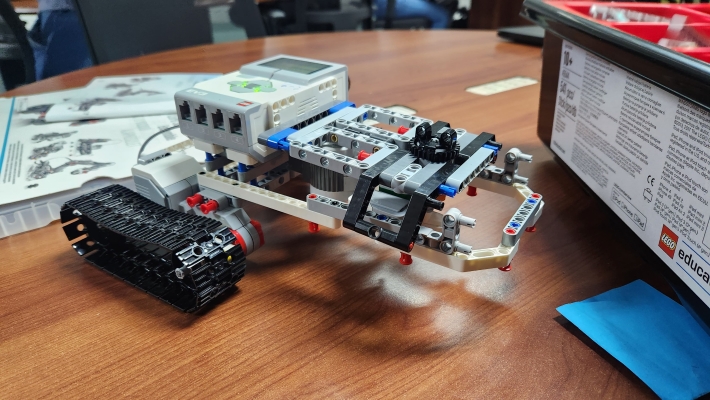 |
| Versión 5 | 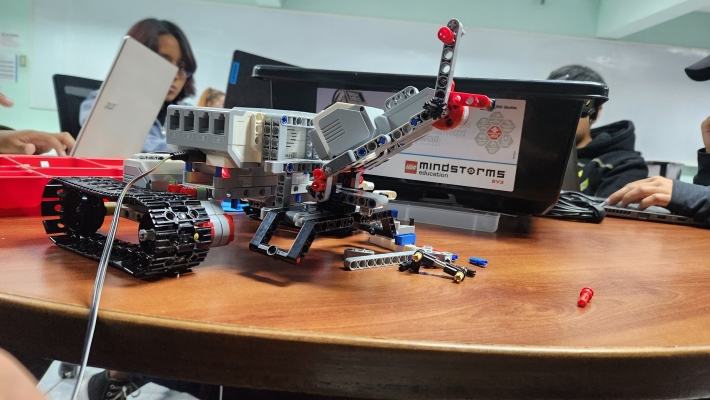 |
| Versión 6 |  |
| Versión 7 | 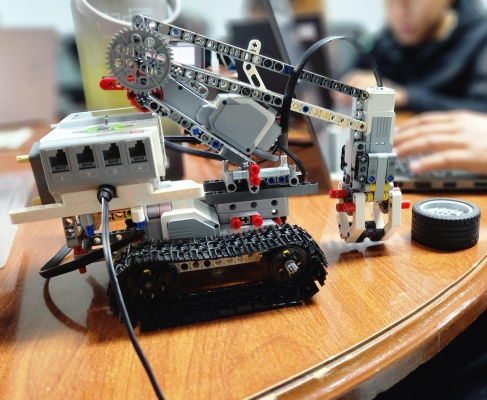 |
Código Utilizado¶
Interfaz Gráfica
import socket
import tkinter as tk
from tkinter import font, messagebox
import threading
class EV3ControlApp:
contador_subir = 0
contador_bajar = 1
contador_abrir = 1
contador_cerrar = 0
def __init__(self, master):
self.master = master
self.master.title("EV3 Control Panel")
self.master.configure(bg='#1a1a1a')
self.master.geometry('600x400')
self.sock = None
# Configuración de columnas y filas
self.master.grid_columnconfigure(0, weight=1)
self.master.grid_columnconfigure(1, weight=1)
self.master.grid_columnconfigure(2, weight=1)
self.master.grid_columnconfigure(3, weight=1)
self.master.grid_rowconfigure(10, weight=1)
self.master.grid_rowconfigure(11, weight=1)
self.master.grid_rowconfigure(12, weight=1)
self.master.grid_rowconfigure(13, weight=1)
self.master.grid_rowconfigure(14, weight=1)
self.master.grid_rowconfigure(15, weight=1)
# Configuración de fuentes y estilo
self.btn_font = font.Font(family='Helvetica', size=14, weight='bold')
self.bg_color = '#2e2e2e'
self.fg_color = 'white'
self.active_bg = '#4d4d4d'
self.padx = 15
self.pady = 15
# Crear widgets
self.create_widgets()
def create_widgets(self):
self.ip_label = tk.Label(self.master, text="IP del EV3:", font=self.btn_font, bg=self.master['bg'], fg=self.fg_color)
self.ip_label.grid(row=10, column=1, padx=self.padx, pady=self.pady)
self.ip_entry = tk.Entry(self.master, font=self.btn_font, bg=self.bg_color, fg=self.fg_color)
self.ip_entry.grid(row=10, column=2, padx=self.padx, pady=self.pady)
self.btn_connect = tk.Button(self.master, text="Conectar", font=self.btn_font, bg=self.bg_color, fg=self.fg_color,
activebackground=self.active_bg, command=self.start_connect_thread)
self.btn_connect.grid(row=10, column=3, padx=self.padx, pady=self.pady)
# Botones de control de movimiento
self.btn_up = tk.Button(self.master, text="▲", font=self.btn_font, bg=self.bg_color, fg=self.fg_color,
activebackground=self.active_bg, command=self.move_up)
self.btn_up.grid(row=11, column=1, padx=self.padx, pady=self.pady, sticky="nsew")
self.btn_left = tk.Button(self.master, text="", font=self.btn_font, bg=self.bg_color, fg=self.fg_color,
activebackground=self.active_bg, command=self.move_left)
self.btn_left.grid(row=12, column=0, padx=self.padx, pady=self.pady, sticky="nsew")
self.btn_stop = tk.Button(self.master, text="■", font=self.btn_font, bg=self.bg_color, fg=self.fg_color,
activebackground=self.active_bg, command=self.stop)
self.btn_stop.grid(row=12, column=1, padx=self.padx, pady=self.pady, sticky="nsew")
self.btn_right = tk.Button(self.master, text="", font=self.btn_font, bg=self.bg_color, fg=self.fg_color,
activebackground=self.active_bg, command=self.move_right)
self.btn_right.grid(row=12, column=2, padx=self.padx, pady=self.pady, sticky="nsew")
self.btn_down = tk.Button(self.master, text="▼", font=self.btn_font, bg=self.bg_color, fg=self.fg_color,
activebackground=self.active_bg, command=self.move_down)
self.btn_down.grid(row=13, column=1, padx=self.padx, pady=self.pady, sticky="nsew")
self.btn_claw_updown = tk.Button(self.master, text="Subir/Bajar garra", font=self.btn_font, bg=self.bg_color, fg=self.fg_color,
activebackground=self.active_bg, command=self.handle_updown)
self.btn_claw_updown.grid(row=12, column=3, padx=self.padx, pady=self.pady, sticky="nsew")
self.btn_claw_openclose = tk.Button(self.master, text="Abrir/Cerrar garra", font=self.btn_font, bg=self.bg_color, fg=self.fg_color,
activebackground=self.active_bg, command=self.handle_openclose)
self.btn_claw_openclose.grid(row=13, column=3, padx=self.padx, pady=self.pady, sticky="nsew")
self.btn_stop_handle = tk.Button(self.master, text="Parar garra", font=self.btn_font, bg=self.bg_color, fg=self.fg_color,
activebackground='#ff4c4c', command=self.stop_handle)
self.btn_stop_handle.grid(row=14, column=3, columnspan=2, padx=self.padx, pady=self.pady, sticky="nsew")
self.btn_quit = tk.Button(self.master, text="Cerrar servidor", font=self.btn_font, bg='#ff5c5c', fg=self.fg_color,
activebackground='#ff4c4c', command=self.quit_app)
self.btn_quit.grid(row=15, column=1, columnspan=2, padx=self.padx, pady=self.pady, sticky="nsew")
def start_connect_thread(self):
ip = self.ip_entry.get()
if self.is_valid_ip(ip):
threading.Thread(target=self.connect, args=(ip,), daemon=True).start()
else:
messagebox.showerror("Error de entrada", "La dirección IP ingresada no es válida.")
def is_valid_ip(self, ip):
parts = ip.split('.')
if len(parts) != 4:
return False
for part in parts:
if not part.isdigit() or not (0 <= int(part) < 256):
return False
return True
def connect(self, ip):
try:
if self.sock is not None:
self.sock.close()
self.sock = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
self.sock.connect((ip, 8080))
messagebox.showinfo("Conexión", "Conectado correctamente al EV3.")
self.enable_controls(True)
except Exception as e:
messagebox.showerror("Error de conexión", f"No se pudo conectar a {ip}. \n{str(e)}")
self.enable_controls(False)
def enable_controls(self, state):
self.btn_up.config(state=tk.NORMAL if state else tk.DISABLED)
self.btn_left.config(state=tk.NORMAL if state else tk.DISABLED)
self.btn_stop.config(state=tk.NORMAL if state else tk.DISABLED)
self.btn_right.config(state=tk.NORMAL if state else tk.DISABLED)
self.btn_down.config(state=tk.NORMAL if state else tk.DISABLED)
self.btn_claw_updown.config(state=tk.NORMAL if state else tk.DISABLED)
self.btn_claw_openclose.config(state=tk.NORMAL if state else tk.DISABLED)
self.btn_stop_handle.config(state=tk.NORMAL if state else tk.DISABLED)
self.btn_quit.config(state=tk.NORMAL if state else tk.DISABLED)
def send_command(self, command):
if self.sock:
self.sock.sendall(command.encode('utf-8'))
def move_up(self):
self.send_command('w')
def move_down(self):
self.send_command('s')
def move_left(self):
self.send_command('a')
def move_right(self):
self.send_command('d')
def stop(self):
self.send_command('x')
def handle_updown(self):
if EV3ControlApp.contador_bajar == 0:
self.send_command('g')
EV3ControlApp.contador_bajar += 1
EV3ControlApp.contador_subir = 0
else:
self.send_command('t')
EV3ControlApp.contador_subir += 1
EV3ControlApp.contador_bajar = 0
def handle_openclose(self):
if EV3ControlApp.contador_cerrar == 0:
self.send_command('f')
EV3ControlApp.contador_cerrar += 1
EV3ControlApp.contador_abrir = 0
else:
self.send_command('r')
EV3ControlApp.contador_abrir += 1
EV3ControlApp.contador_cerrar = 0
def stop_handle(self):
self.send_command('c')
def quit_app(self):
if EV3ControlApp.contador_abrir == 0:
self.send_command('r')
if EV3ControlApp.contador_bajar == 0:
self.send_command('g')
self.send_command('c')
self.send_command('q')
self.sock.close()
self.master.quit()
if __name__ == "__main__":
root = tk.Tk()
app = EV3ControlApp(root)
root.mainloop()
EV3
from ev3dev2.motor import MoveTank , OUTPUT_A, OUTPUT_B, LargeMotor , OUTPUT_C, MediumMotor, OUTPUT_D
import time
mov_garra = LargeMotor(OUTPUT_C)
garra = MediumMotor(OUTPUT_D)
tankmoves = MoveTank(OUTPUT_A, OUTPUT_B)
def move_up():
"""Mueve el robot hacia adelante."""
print("Avanzar")
tankmoves.on(25, 25)
def move_down():
"""Mueve el robot hacia atrás."""
print("Retroceder")
tankmoves.on(-25, -25)
def move_right():
"""Gira el robot a la derecha."""
print("Derecha")
tankmoves.on(5, -5)
def move_left():
"""Gira el robot a la izquierda."""
print("Izquierda")
tankmoves.on(-5, 5)
def handle_up():
"""Gira el robot a la izquierda."""
print("Subiendo")
mov_garra.on(-7)
time.sleep(4)
mov_garra.off()
def handle_down():
"""Gira el robot a la izquierda."""
print("Bajando")
mov_garra.on(7)
time.sleep(4)
mov_garra.off()
def handle_open():
print("Abriendo")
garra.on(3)
def handle_close():
print("Cerrando")
garra.on(-3)
def stop_handle():
print("Deteniendo garra")
garra.off()
def stop():
print("Detenido")
tankmoves.off()
Servidor
import socket
from library import *
# Creacn del socket
s = socket.socket()
print("Socket creado")
# Definicn del puerto
port = 8080
s.bind(('192.168.70.191', port))
print("El socket se crcon puerto: {}".format(port))
# Escuchando conexiones
s.listen(5)
print("El socket esescuchando...")
# Aceptacin de la conexn
connect, addr = s.accept()
print("Se conecta {}".format(addr))
# Bucle principal para recibir datos
while True:
rawByte = connect.recv(1)
char = rawByte.decode('utf-8')
# Movimiento hacia arriba
if char == 'w':
move_up()
# Movimiento hacia abajo
if char == 's':
move_down()
# Mover a la derecha
if char == 'd':
move_right()
# Mover a la izquierda
if char == 'a':
move_left()
if char == 't':
handle_up()
if char == 'g':
handle_down()
if char == 'r':
handle_open()
if char == 'f':
handle_close()
if char == 'c':
stop_handle()
if char == 'x':
stop()
if char == 'q':
print("Terminando la sesn...")
break
---