Análisis de la arquitectura¶
Análisis y Diseño¶
Para el cuerpo del robot de golf, se investigó sobre cómo diseñar el brazo o mecanismo que iba a realizar el movimiento de golpeo, esto implicó seleccionar las piezas adecuadas para crear un brazo articulado que pueda imitar el movimiento de un swing de golf y calcular, mediante las fórmulas físicas del movimiento parabólico, el ángulo del golpe.
En su programación, utilizamos el software proporcionado por LEGO para el EV3, donde creamos un programa que controla los motores y los sensores del robot. El programa incluye algoritmos que permiten al robot moverse hacia la pelota, ajustar su posición para un golpe óptimo y, finalmente, realizar el movimiento de golpeo de manera controlada.
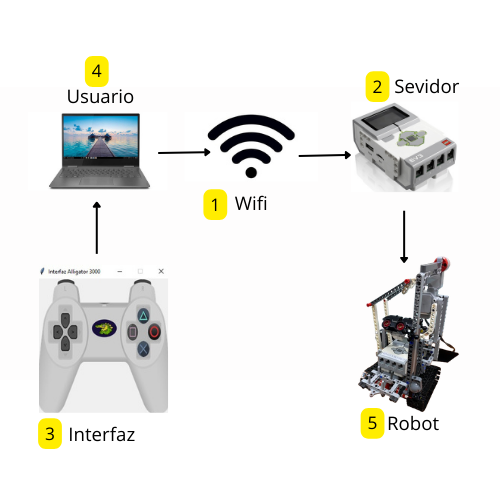
- El Servidor y el notebook deben estar conectados a la misma red Wifi.
- Para iniciar la conexión remota con el notebook, se debe ejecutar el archivo Server.py.
- Una vez iniciada, la interfaz gráfica puede ser activada por el usuario para controlar el robot a distancia.
- La interfaz se conecta al servidor del robot, permitiendo al usuario enviar comandos para controlar los movimientos del robot.
- Los movimientos del robot son ejecutados en respuesta a las instrucciones enviadas por el usuario a través del servidor establecido entre el robot y el notebook.
Imágenes del Robot¶
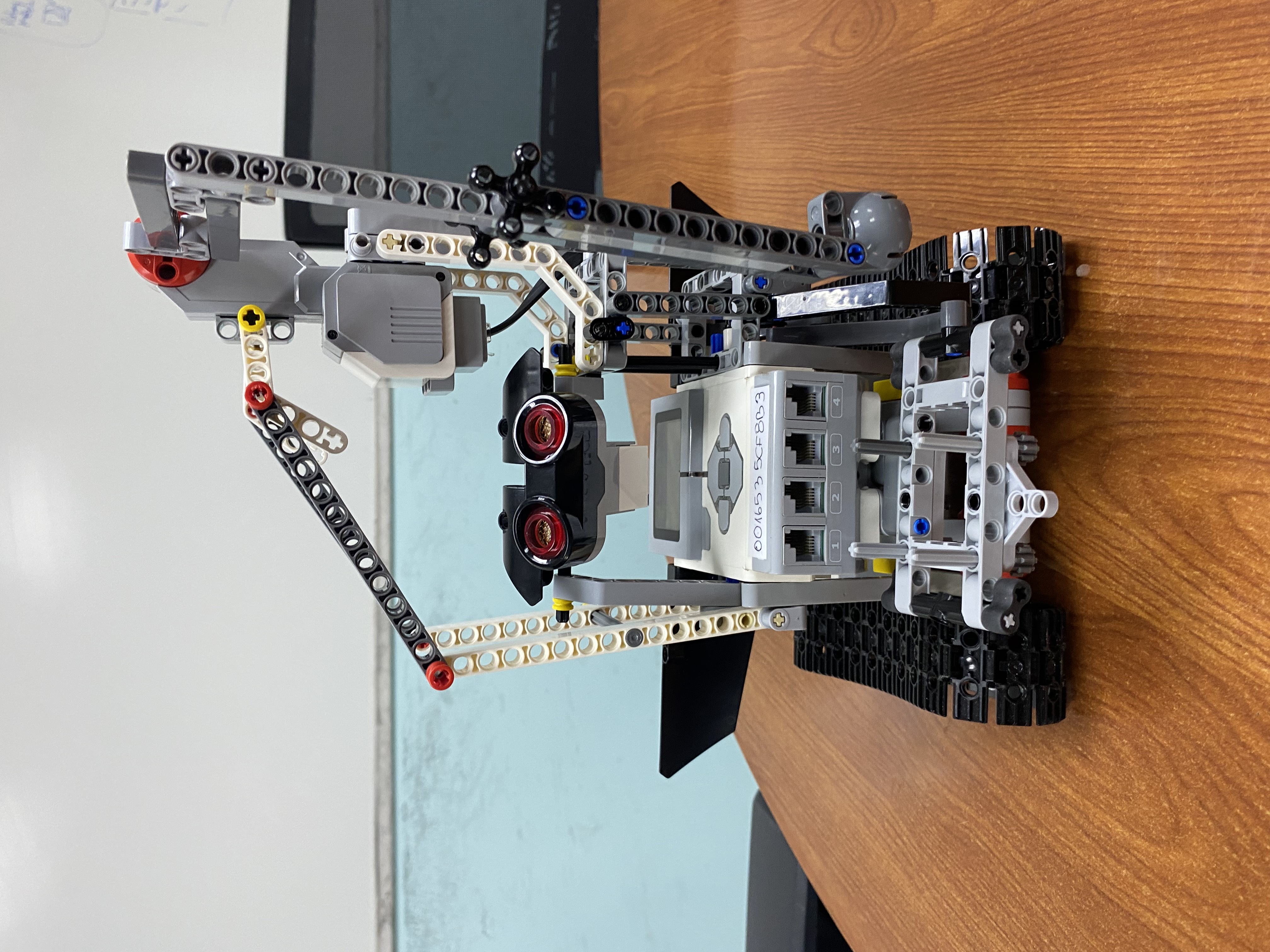
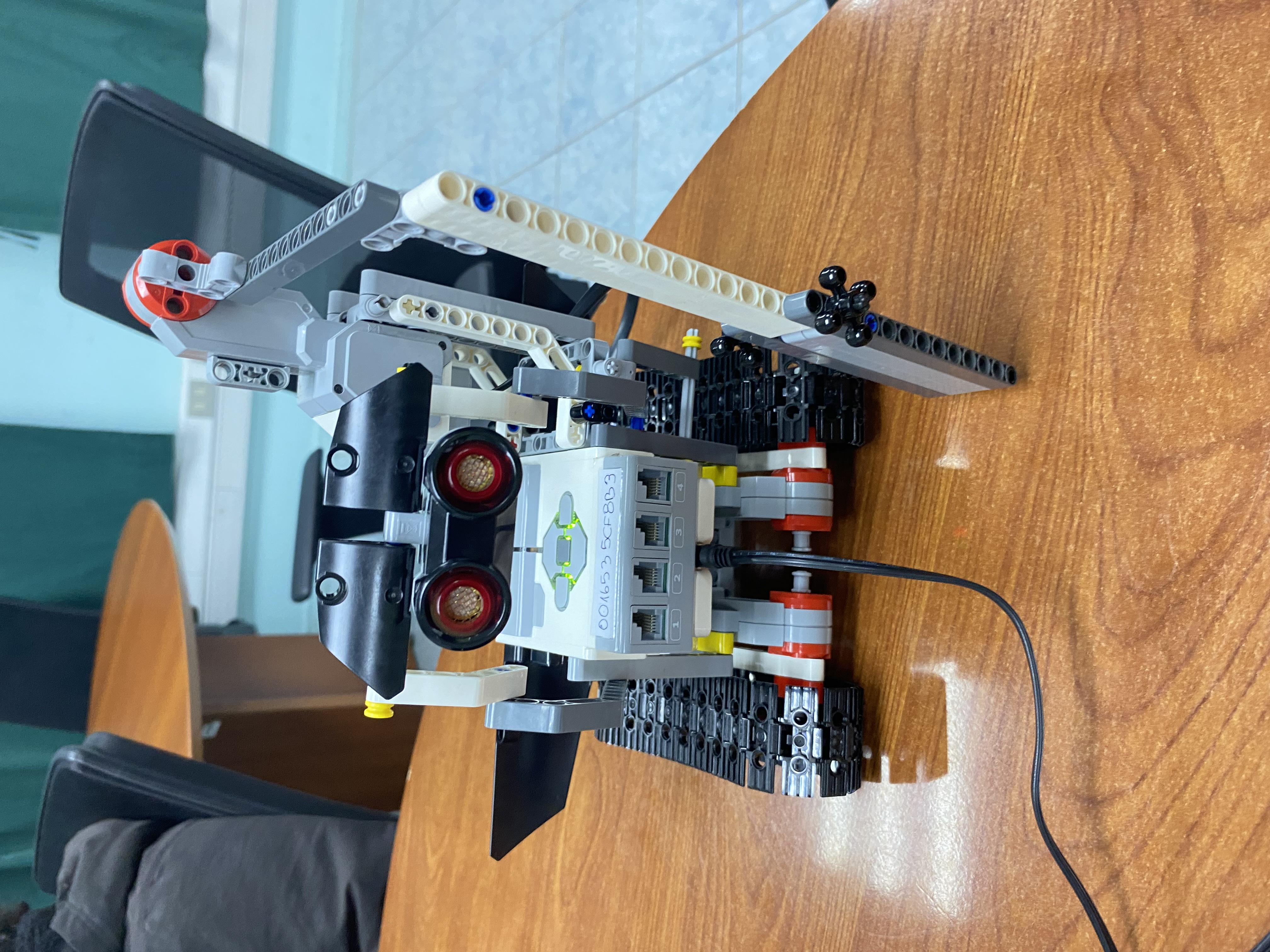
Primer prototipo del "Alligator 3000"¶
Primera idea del robot, su estructura es débil y tiende a desarmarce en cuanto se ejecuta.

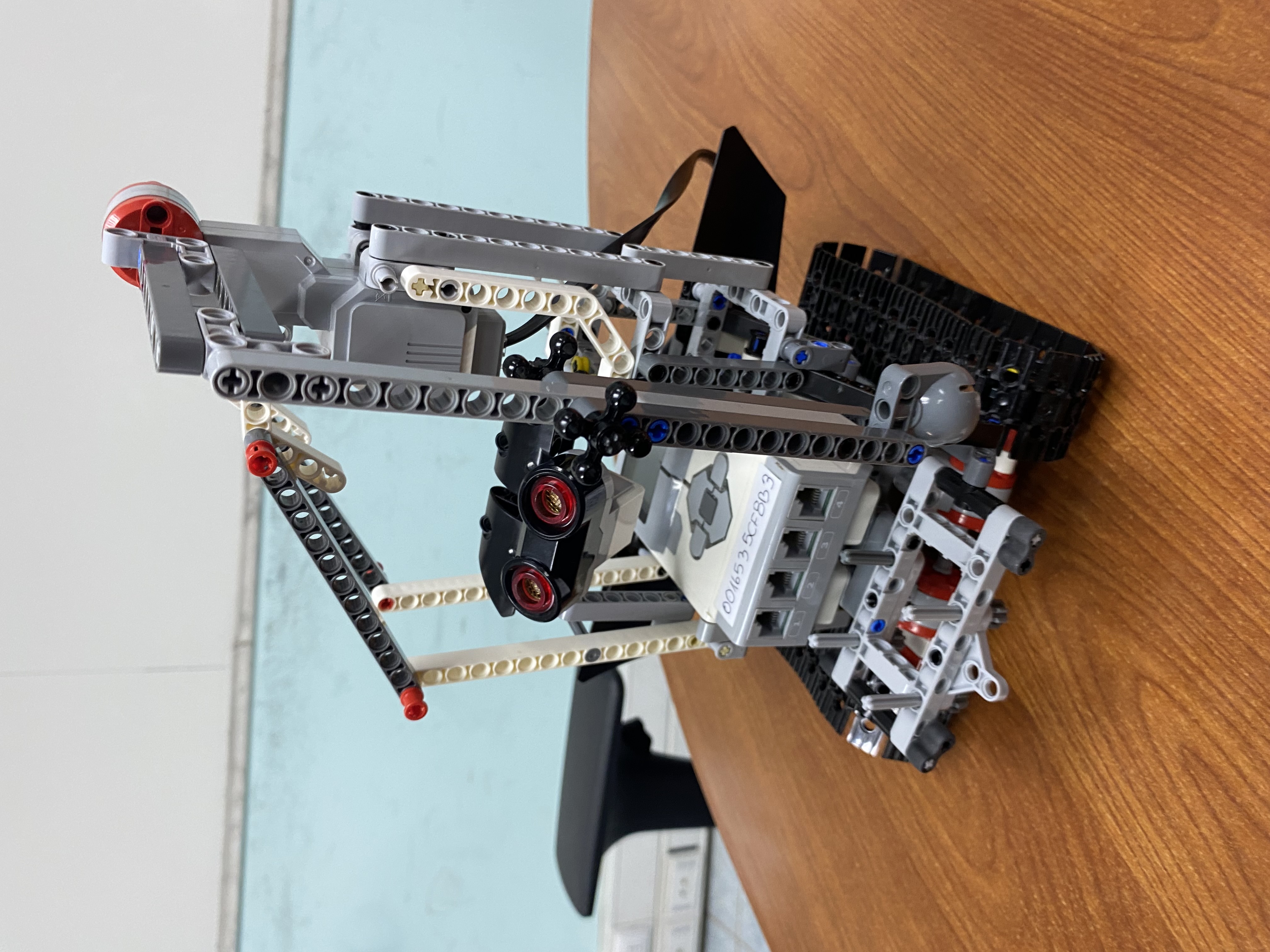
Prototipo 1.¶
Se le agregó un soporte para posicionar la pelota, además de reforzar la arquitectura del robot para que tenga más estabilidad.
Side check
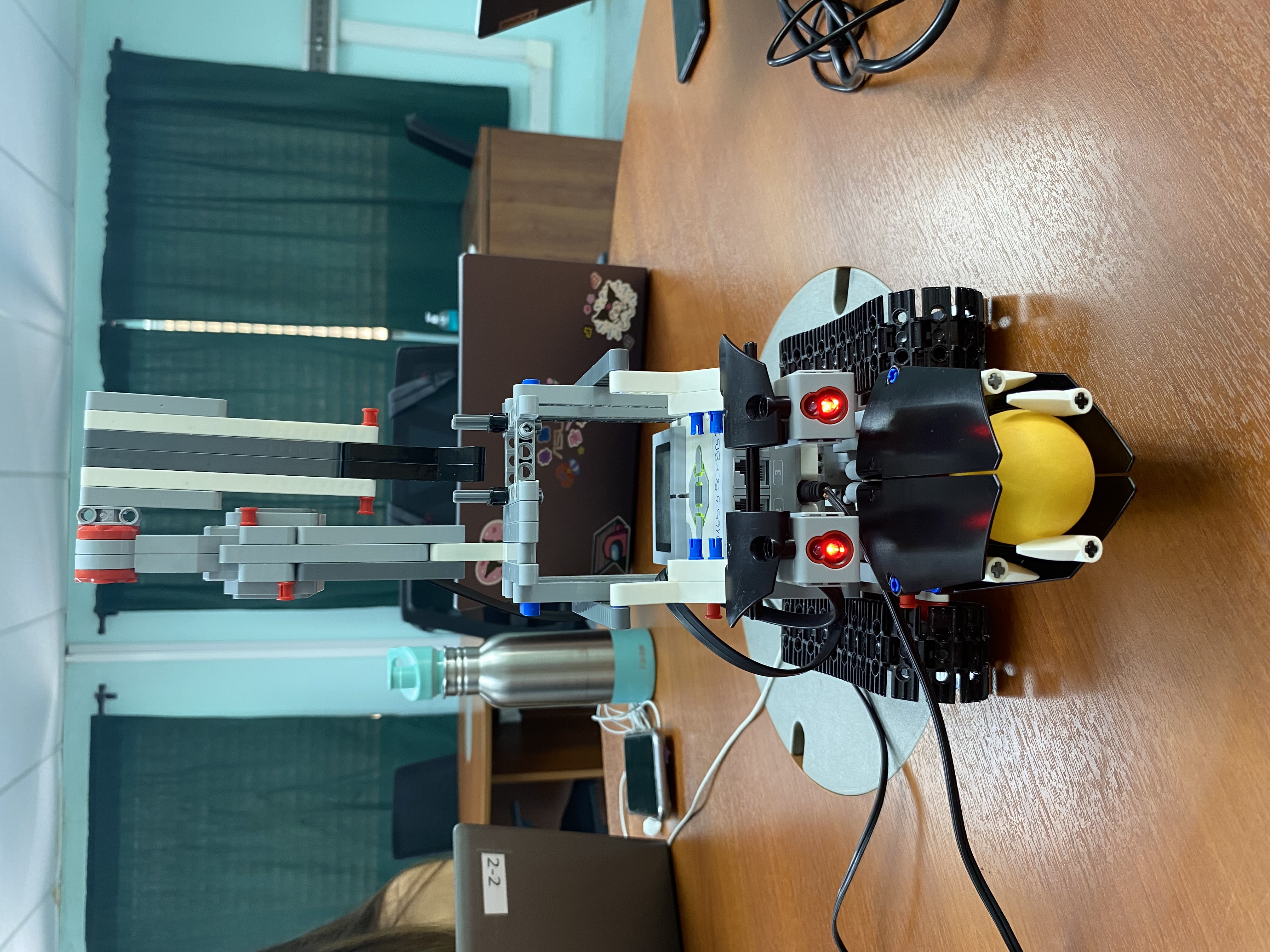
PROTOTIPO FINAL.¶
{kind=link}