Wiki » History » Version 22
« Previous -
Version 22/97
(diff) -
Next » -
Current version
alexis yucra, 10/06/2022 08:24 AM
Proyecto "Robot SCORPION MACHINE GUN"¶
integrantes:
-Alexis Yucra
-Leandro molina
-Sebastian Cayupi
-Francisco Silva
-Arturo Rodriguez¶
objetivos generales¶
Desarrollar un robot que tenga el diseño de un tanque,donde el tanque pueda moverse atraves de una interfaz con distintas funciones y que realize el lanzamiento de un elastico.
Consiste en el desarrollo de un robot con diseño de tanque donde este se podrá maniobrar a distancia ,como maniobrar lo a distancia ? bueno se desarrollara una aplicación
que contenga las funciones robot (movimiento del robot, disparo del cañón).
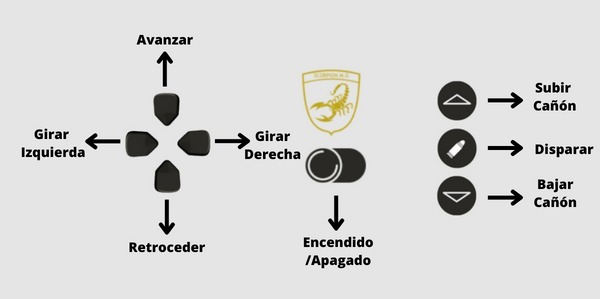
- función movimiento del robot: consiste en hacer que el robot pueda moverse libremente donde nosotros le indiquemos con los comandos de la función.
- Función movimiento de cañón:consiste en que el robot pueda mover el cañón de arriba hacia abajo o viceversa y hacerlo disparar en la posición mas conveniente.
{kind=link}
{kind=link}